|
|
Topic: P231 |
Find Home (HOME) Instruction |
|
|
|
Topic: P231 |
Find Home (HOME) Instruction |
|
Mnemonic (Keyboard Shortcut) = HOMEIcon / Button = PurposeThe Find Home instruction allows the user to run a variety of homing routines. Homing is needed to bind the HSO channel or AMC axis position to that of a real world physical position. Generally homing is only necessary on power up of a machine that incorporates incremental positional feedback. Of course, homing may be needed at other times as well depending on the application. Note: The Position Limits are disabled during a Homing Move. The Hardware Limit Switches still apply. Instruction Parameters
Note: The Feedback received for the Status tags can take one or more scans to register within the CPU depending on the CPU scan time and processing delays within the HSO or AMC module Instruction Rules
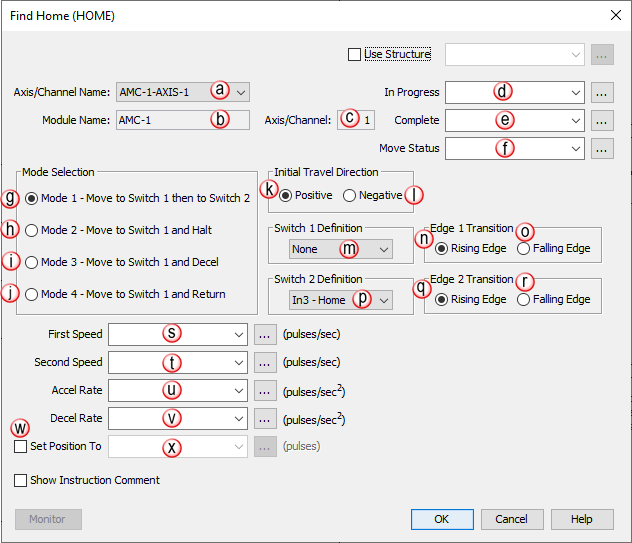
Note: All parameters are checked before the motion begins. If a move violates one of the rules, the instruction will be aborted before any motion occurs. Note: The instruction may not function correctly if the axis is being used in another instruction in ladder. If two separate instructions in ladder use the same axis, the latest one (in the scan cycle(s)) controls the axis. Instruction ConfigurationWhen the Find Home Instruction is selected, the window shown below opens with defaults shown.
Application ExampleThe following example demonstrates how the Find Home (HOME) instruction can be utilized in a Tea Pot Pick and Place system. On power up, shutdown or any other time it may be required the Homing instruction can be executed in order to initialize or reset the system. For this example, the HOME instruction will be set to Mode 1. When the instruction is enabled, the gantry arm will accelerate to the First Speed Selection and travel at that speed until Switch #1 is triggered. The gantry arm will then decelerate to the Second Speed Selection and travel at that speed until Switch #2 is triggered. Once Switch #2 is triggered, the gantry arm will stop.
Timing Charts
Note: The Complete Status and Move Status updates may also be delayed by the Accel Rate, Decel Rate and Stop Setup options selected. Mode ExamplesMode 1Move to Switch 1 then to Switch 2.
1. Accelerate to First Speed. 2. Travel at First Speed until Edge 1 of Switch 1 occurs. 3. Decelerate to Second Speed. 4. Travel at Second Speed until Edge 2 of Switch 2 occurs. 5. Immediately Stop and optionally set the position to a user specified value. Note: In Mode 1, depending on direction of travel, if Switch 2 is made prior to Switch 1 the move will halt. Mode 2Move to Switch 1 and Halt.
1. Accelerate to First Speed. 2. Travel at First Speed until Edge 1 of Switch 1 occurs. 3. Immediately Stop and optionally set the position to a user specified value. Mode 3Move to Switch 1 and Decelerate.
1. Accelerate to First Speed. 2. Travel at First Speed until Edge 1 of Switch 1 occurs. 3. Optionally set the position to a user specified value at Switch 1. and Decelerate to a Stop. Mode 4 Move to Switch 1 and Return.
1. Accelerate to First Speed. 2. Travel at First Speed until Edge 1 of Switch 1 occurs. 3. Decelerate to a Stop. 4. Accelerate to Second Speed in the opposite direction. 4b. Travel at Second Speed until Edge 2 of Switch 1 occurs. 5. Immediately Stop and optionally set the position to a user specified value. Flow Charts
Rung Example
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Status |
Description |
|
| 1 |
Px-HSO: Accelerating |
This bit shows the current state of the channel while movement is accelerating (when In Progress Bit = ON). After the instruction is Complete, this bit will be OFF. |
|
PS-AMCx: General Use Status 1 |
AREG: Waiting For Master Event |
|
|
FCO: Waiting for Event Start |
||
|
GEAR: Primary Drivetrain Slave is Enabled |
||
|
MREG: Correction Move In Progress |
||
|
MSEQ: Dwell Period of Timeout is Active |
||
|
RTA: Table stopped at station |
||
| 2 |
Steady Velocity |
This bit shows the current state of the channel or axis while movement is running in steady state (when In Progress Bit = ON). After the instruction is Complete, this bit will be OFF. |
| 3 |
Px-HSO: Decelerating |
This bit shows the current state of the channel while movement is decelerating (when In Progress Bit = ON). After the instruction is Complete, this bit will be OFF. |
|
PS-AMCx: General Use Status 2 |
AREG: Waiting For Product Event |
|
|
FCO: Tool Slewing to Synchronization |
||
|
GEAR: Secondary Drivetrain Slave is Enabled |
||
|
RTA: Alert: Invalid Absolute Station Id |
||
| 4 |
Px-HSO: Future |
Future |
|
PS-AMCx: General Use Status 3 |
AREG: Correction Applied |
|
|
FCO: Tool is in Synchronization with the Master |
||
|
GEAR: Third Drivetrain Slave is Enabled |
||
|
MREG, SMOV, VMOV: Position Capture Occurred (1 or 2 scan pulse) |
||
| 5 |
Px-HSO: Future |
Future |
|
PS-AMCx: General Use Status 4 |
GEAR: Fourth Drivetrain Slave is Enabled |
|
| 6 |
Px-HSO: Future |
Future |
|
PS-AMCx: Application Move |
Info – Application Move is in Progress (Movement or active slave ) |
|
| 7 |
Stopped at Move Target |
This bit is ON when the instruction completes and the Target position was achieved without any Errors or Aborts. |
| 8 |
Stopped at Registration Target |
This bit is ON when the instruction completes a Registration function using the Decel to a Stop option without any Errors or Aborts. |
| 9 |
Aborted - Instruction Disabled |
This bit indicates that the instruction was disabled in the ladder by the user |
| 10 |
Aborted - Hit Limit (See Channel or Axis Status Register) |
This bit indicates that either a Limit Switch or Position Limit has been tripped. The Channel or Axis Status will indicate which of the 4 possible conditions has occurred. |
| 11 |
Aborted - Communications Failure During Move |
This bit indicates that communication to the module failed previously. The module may now be ready but the current instruction must be restarted. This condition may occur due to a hot-swap or a loss of communication to a Remote Slave Base. |
| 12 |
Aborted - IO Fault (See Module Error Register) |
If the ESCP (Electronic Short Circuit Protection) becomes active for the Output Channels associated with the current instruction, the instruction will abort since the intended operation will fail. This bit will turn ON and the specific Channel error can be found in the Module Error Code, Bits 2 & 3. Note: Faults on Channels 3-6 will not cause this abort and must be detected using the Channel Status and Module Error Code. |
| 13 |
Aborted - Over User's Max Accel |
In the HSO H/W Configuration Channel setup or the PS-AMC Axis Configuration, the user has the option to either Limit a move to a maximum value or Stop the move once that maximum value is exceeded. If the Channel or Axis is configured to Stop the Move and the instruction exceeds the Maximum value, the instruction will Abort and one of these related bits will turn ON. |
| 14 |
Aborted - Over User's Max Decel |
|
| 15 |
Aborted - Over User's Max Velocity |
|
| 16 |
Px-HSO: Aborted - Position Limit out of range |
If the tag values assigned to the Position Limits are out of range, the instruction will Abort and this bit will be ON. Note: Affected by Channel Scaling. |
|
PS-AMCx: Future |
Future |
|
| 17 |
Px-HSO: Aborted - Target out of range |
When Position Limits are configured and the Instruction Target position is known to be beyond the Position Limits, the Instruction will Abort before any motion starts and this bit will be set ON. Note: Affected by Channel Scaling. |
|
PS-AMCx: Abort Invalid Input/Edge Combination |
This will occur when an axis is configured for RPI ( Reset Position by Input ) and that axis is running an instruction ( or it’s slave ) and tries to use the same input as RPI with a different edge. |
|
| 18 |
Aborted - Velocity out of range |
The HSO outputs can be run at a maximum of 1MHz. If the instruction commands a velocity greater than 1MHz, the instruction will Abort with this bit ON. Note: Affected by Channel Scaling. |
| 19 |
Aborted - Accel/Decel/Ramp out of range |
If the value assigned to the Acceleration or Deceleration Ramp is outside the valid range (1 to 100e6), the instruction will Abort and this bit will be ON. >Note: Affected by Channel Scaling. |
| 20 |
Aborted - Jerk/S-Curve out of range |
If the Jerk value is outside the valid range of 1 to 100e9or the S-Curve value is outside the range of 1 to 100e6, the instruction will Abort and this bit will be ON. Note: Affected by Channel Scaling. |
| 21 |
Px-HSO: Future |
Future |
|
PS-AMCx: Axis Status |
Additional information will be stored in the Axis Status register tag |
|
| 22 |
Px-HSO: Future |
Future |
|
PS-AMCx: Aborted - General Parameter |
There is a general parameter out of range ( does not include velocity, ramps, jerk, registration, or presets ) |
|
| 23 |
Px-HSO: Future |
Future |
|
PS-AMCx: Aborted – Preset Parameter |
There is a preset parameter out of range |
|
| 24 |
Aborted - Registration parameter out of range |
At least one of the Registration input parameters is out of range. Parameters such as: Delay Registration Action by, Decel to a Stop or Output Pulse Time. |
| 25 |
Alert - Target reached during Accel/Decel |
If a home switch is reached while accelerating or decelerating, this bit will be set. To ensure repeatable accuracy, you must adjust your parameters or move further away from home and re-home so that the switch is reached at a steady speed. |
| 26 |
Alert - Parameter Adjusted: Over User's Max Accel |
In the HSO H/W Configuration Channel setup, the user has the option to either Limit a move to a maximum value or Stop the move once that maximum value is exceeded. If the Channel is set to Use the Maximum Value and the instruction exceeds this value, the instruction will not Abort and the output will be limited to the Maximum Value with the related Alert bit set to ON. |
| 27 |
Alert - Parameter Adjusted: Over User's Max Decel |
|
| 28 |
Alert - Parameter Adjusted: Over User's Max Velocity |
|
| 29 |
Px-HSO: Alert - Position Rolled Over |
These bits are set to report the occurrence of a Roll Over and/or Roll Under. They will remain set for 3 scans and then clear. This makes it possible to detect multiple roll over and/or roll under events using ladder code. The default rollover positions are +/- 2,147,483,647 but Channel Scaling affects this range and if Rotary Mode is enabled, the range will always roll under at zero, and roll over to zero. |
| 30 |
Px-HSO: Alert - Position Rolled Under |
|
| 31 |
Future |
Future |
| 32 |
Future |
Future |