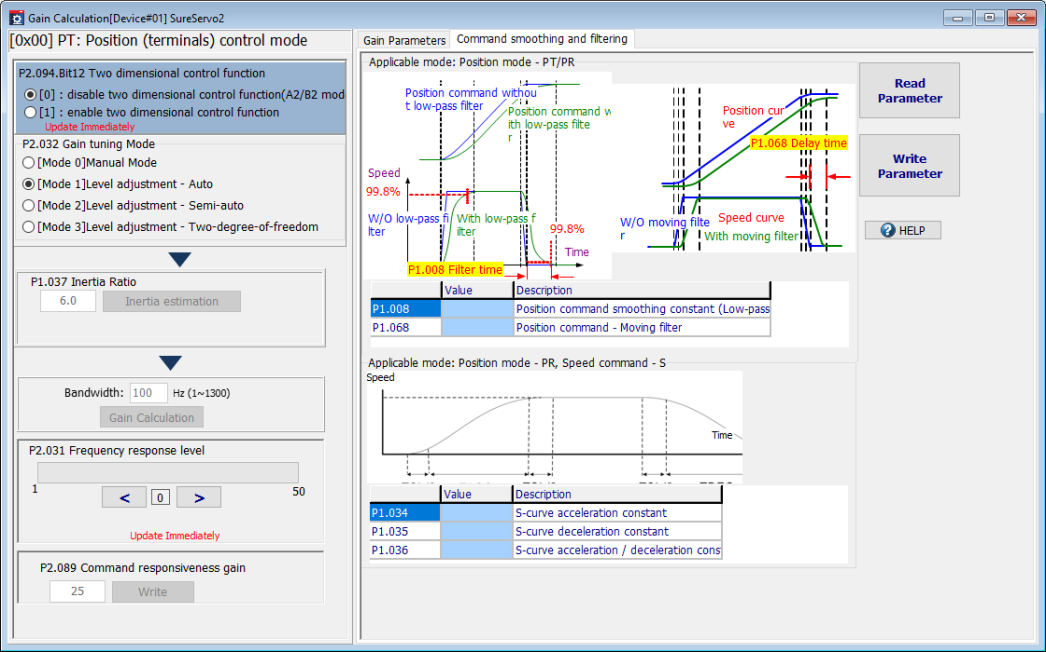
The Command Smoothing and Filtering screen displays parameters pertinent to command smoothing and filtering. This tunes responsiveness between the controller and the drive. Press the Read Parameter button to load values from the servo to the software. Press the Write Parameter button to load values from the software to the servo.
| Option | Function |
|---|---|
| P1.008 | P1.008 controls the Position Command Smoothing Constant (Low-pass filter). Acceleration to the target position is given an S-curve towards the end of the acceleration over the time frame entered in P1.008. The default value is 0ms, settings range from 0 to 1000 ms in increments of 10ms. If the E-Cam function is being used, this value should be 0. |
| P1.068 | P1.068 controls the Position Command - Moving Filter, which activates the smoothing function at the beginning and end of a step, but also delays the command. A value of 0 disables this function. The default value is 4ms, settings range from 0 to 100 ms. |
| P1.034 | P1.034 controls the Acceleration Time Constant (TACC), which represents the acceleration time for the Speed command from zero to the motor's rated speed. This is used for Speed mode and for PT (high speed pulse input) Mode. The default is 200ms, with settings ranging from 1 to 65,500 ms. |
| P1.035 | P1.035 controls the Deceleration Time Constant (TDEC), which represents the deceleration time for the Speed command from the motor's rated speed to zero. This is used for Speed mode and for PT (high speed pulse input) Mode. The default is 200ms, settings range from 1 to 65,500 ms. |
| P1.036 | P1.036 controls the S-curve Acceleration / Deceleration Time Constant (TSL), which sets the smoothing time for the S-curve acceleration/deceleration used by P1.034 and P1.035. A value of 0 disables this function. The default value is 0ms, settings range from 0 to 65,500 ms. |