 to copy parameters from the drive to the software.
to copy parameters from the drive to the software.The Gain Parameters tab of the Gain Tuning screen can be used to change the control function and gain tuning mode, as well as display and adjust the various gain parameters. These parameters tune responsiveness between the drive and the motor.
Enable and disable the Two dimensional control function using P2.094.
Set the Gain Tuning Mode using P2.032.
Press the Inertia Estimation button to estimate the load inertia to motor inertia ratio. Pressing the button will open the Inertia Estimation screen. Once completed, the P1.037 field will be populated with the calculated estimate. Press the Write button to push the value to the servo drive.
Adjust the motor Frequency Response level P2.031 by using the left/right arrows to adjust the slider. This parameter updates immediately.
Update the Bandwidth value and press Gain Calculation to change the Calculation Result.
Enable or disable Auto Resonance Suppression using the drop down above the Resonance Suppression Parameters.
Use to copy parameters from the drive to the software.
Use  to copy parameters from the software to the drive.
to copy parameters from the software to the drive.
Displays real-time servo status information for Stabilizing time, Max. overshoot, Max. current of the motor, and Overload warning level.
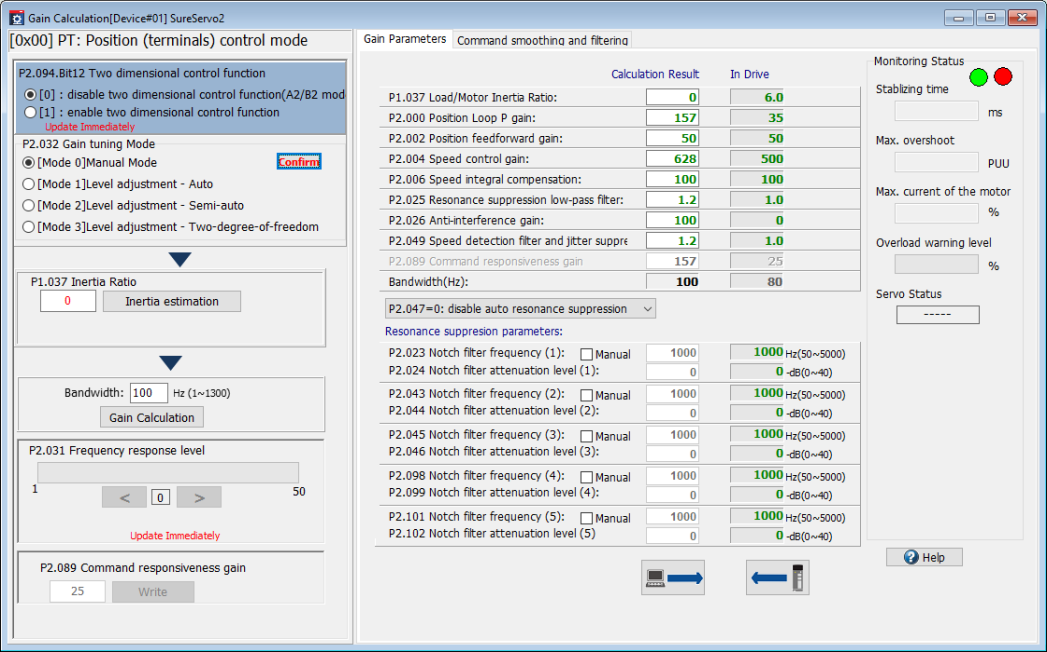
Note: The value set for P2.032 Gain Tuning Mode will determine the options available on this screen. Some options will be disabled for certain modes, while other options will function a little differently. For example, the Calculation Result column only appears for [Mode 0] Manual Mode. If you are not able to access a desired function, try changing the Gain tuning mode.
| Option | Function |
|---|---|
| Two Dimensional Control Function | P2.094 allows you to disable or enable two dimensional control functionality. [0] to disable, [1] to enable. Note that when this is disabled, Gain Tuning Mode 3 becomes equivalent to Gain Tuning Mode 2, so Mode 3 will be disabled. |
| Gain Tuning Mode | Set the gain tuning mode using P2.032. The four levels of auto tuning range from no automatic control (Mode 0) to most automatic control (Mode 3). For most applications AutomationDirect recommends using [Mode 3] Level Adjust - Two-degree-of-freedom. |
| Inertia Ratio | P1.037 Inertia Ratio displays the ratio for the inertia of the load compared to the inertia of the motor. Values under 10 indicate a system capable of working properly. Values over 10 indicate the motor is being overworked and you should either lighten the load or increase the size of your motor. The default value is 6.0 times, but settings range from 0.0 to 200.0 times. |
| Gain Calculation | The value can only be modified in [Mode 0] Manual Mode. Adjusting the Bandwidth value changes the results displayed in the Calculation Result column to tuning values appropriate for that bandwidth. |
| Frequency Response Level | P2.031 adjusts the frequency response level. Default value is 19, possible settings range from 1 to 50. As this value increases, the servo frequency increases as well. |
| Command Responsiveness Gain | P2.089 speeds up the responsiveness of the position command and shortens the tuning time. If the value is too high it causes position overshoot which leads to machine jitter. The default value is 25 rad/s, settings range from 1 to 2000 rad/s. This parameter behaves differently when running in [Mode 2] and [Mode 3]. When running in [Mode 2] P2.089 is adjusted automatically when P2.032 is adjusted. When running in [Mode 3] P2.032 and P2.089 can be adjusted separately. |
| Position Loop P Gain | P2.000 sets position control gain. Increasing this value can enhance the position response and reduce position errors. Setting the value too high can cause vibration and noise. The default value is 35 rad/s with possible settings between 0 and 2047 rad/s. |
| Position Feedforward Gain | P2.002 can be used to reduce position following errors or reduce mechanical vibration. If position control command changes position smoothly, you can increase P2.002 to reduce position following errors. If it does not change smoothly you can decrease P2.002 to reduce mechanical vibration. The default value is 50%, possible settings range from 0 to 100%. This parameter is disabled when the Two Dimensional Control Function is enabled (P2.094=1). |
| Speed Control Gain | P2.004 sets the speed control gain. Increasing this value can enhance the speed response. If the value is too high it may cause vibration and noise. The default value is 500 rad/s, settings range from 0 to 8191 rad/s. |
| Speed Integral Compensation | P2.006 sets the integral speed control. Increasing this value can enhance speed response and reduce the deviation in speed control. If the value is too high, it may cause vibration and noise. The default value is 100 rad/s, settings range from 0 to 1023 rad/s. |
| Resonance Suppression Low-pass Filter | P2.025 sets the time constant for the low-pass filter for resonance suppresion. The default value is 1.0 ms, with possible settings between 0.0 and 100.0 ms. If this parameter is set to 0, the low-pass filter will be disabled. |
| Anti-interference Gain | P2.026 controls damping of the speed loop and can reduce the speed loop response. AutomationDirect recommends setting P2.026 to the same value as P2.006. The default value is 0 rad/s, with possible settings between 0 and 1023 rad/s. |
| Speed Detection Filter and Jitter Suppression | P2.049 sets the filter for speed estimation. If the value is too high the phase margin affecting the speed loop decreases which makes the system unstable. The default value is 1.0 ms, with possible settings between 0.0 and 100.0 ms. |
| Auto Resonance Suppression | Available in [Mode 0] Manual mode only. P2.047 allows you to enable or disable auto-resonance suppression. [0] disables auto-resonance suppression. [1] enables auto-resonance suppression with non-continuous adjustment. [2] enables auto-resonance suppression with continuous adjustment. |
| Notch Filter Frequency | P2.023, P2.043, P2.045, P2.098, and P2.101 set the resonance frequency for Notch filters 1 through 5 respectively. Default value is 1000Hz, with possible settings between 50 and 5000 Hz. If attenuation level (see below) is set to 0, this functionality is disabled. |
| Notch Filter Attenuation Level | P2.024, P2.044, P2.046, P2.099, and P2.102 set the filter attenuation level for Notch filters 1 though 5 respectively. The default value is 0 -dB, with possible settings between 0 and 40 -dB. When the value is 0, the Notch Filter Frequency function (see above) is disabled. |