EtherCAT External Latch and Position Capture with XPM_LRD, XPM_LCLR, and XPM_LSET
-
The XPM_LSET function block is used to enable and initialize the position latch capability of an axis.
-
The XPM_LRD function block is used to read data count and latch position data saved by the servo drive’s touch probe input.
-
The XPM_LCLR function block is used to initialize and reset the latch data count and latch position data of an axis.
-
A touch probe input must be set up on the servo drive to use position latching.
-
These examples can be found in OnlineHelp_ECAT_Example in the LP614_Position_Latch_Example Scan program.
-
XPM_ECON needs to be executed first so EtherCAT servo drives are connected to receive commands.
The LS Electric Drive CM software is used to configure the inputs on the iX7NH EtherCAT servo drive.
-
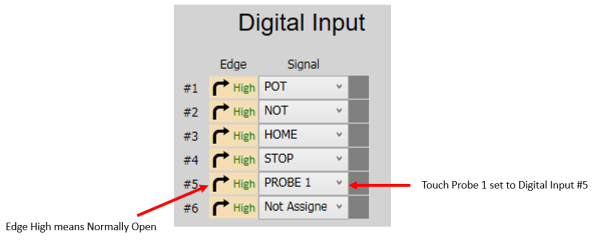
For these examples, Digital input #5 for Axis 1 is configured as a touch probe.
-
The touch probe is configured as a Normally Open input.
| Step | Action |
|---|---|
| 1 | Open Drive CM and connect to the iX7NH servo drive. |
| 2 |
Press the Digital Input button on the toolbar.
Set Digital Input #5 to be Probe 1.
|
| 3 |
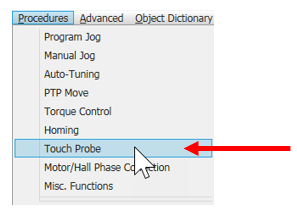
Go to Procedures menu and select Touch Probe.
|
| 4 |
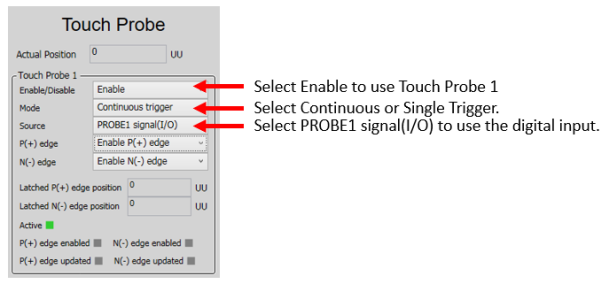
Configure settings for Touch Probe 1.
|
| 5 |
Press the Save to Memory button to save settings to the drive.
|


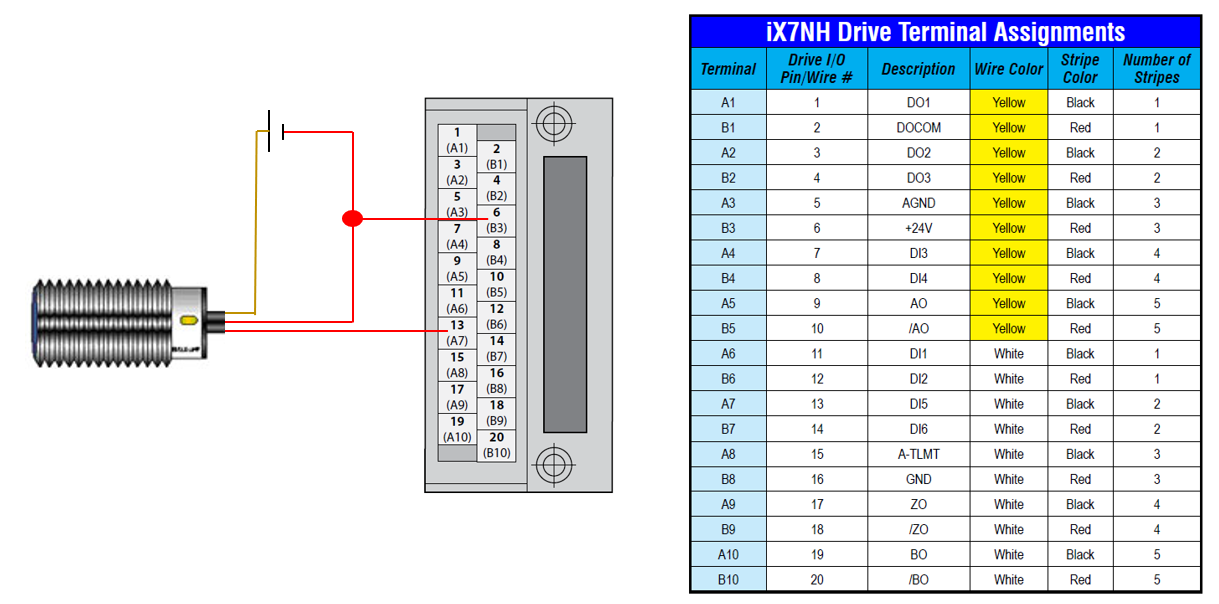
This example shows a PNP sensor wired to Digital Input #5 of an iX7NH servo drive.
LP614