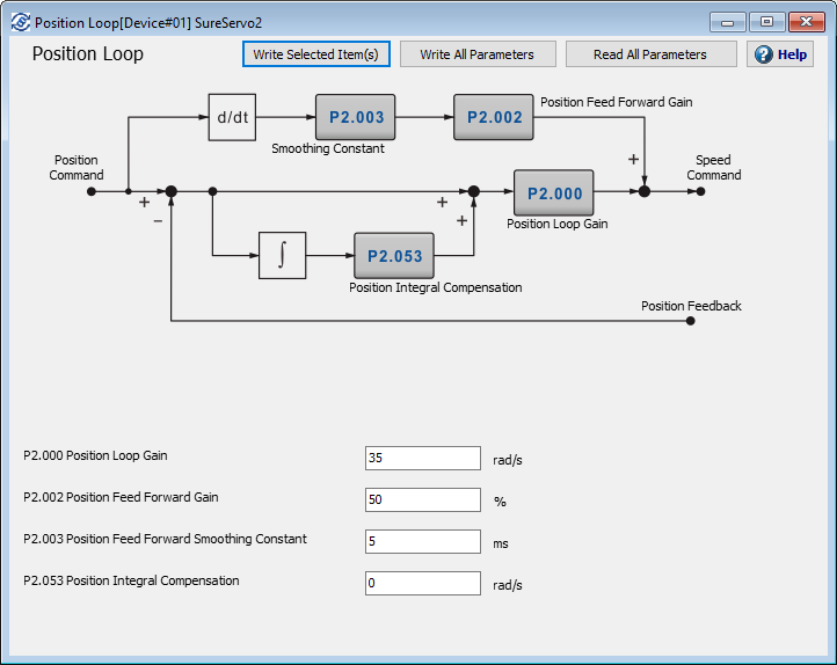
The Position Loop screen allows you to adjust the gain, smoothing, and integral compensation parameters that make up the position loop.
| Option | Function |
|---|---|
| Position Loop Gain | P2.000 sets position loop gain in rad/s. Range is 0 to 2047. Note if this value is too high it may cause vibration and noise. |
| Position Feed Forward Gain | P2.002 sets the position feed forward gain percentage. Range is 0 to 100. |
| Position Feed Forward Smoothing Constant | P2.003 sets the position feed forward gain smoothing constant in 1ms increments. Range is 2 to 100. |
| Position Integral Compensation | P2.053 sets the position integral compensation in rad/s. Range is 0 to 1023. Note if the value is too high it may cause position overshoot and noise. |
You can load the current parameter values to the text boxes by clicking Read All Parameters.
Parameter data can be adjusted by typing a new value in the appropriate text box. The box can either be selected directly, or by clicking on the parameter in the position loop flowchart. To update multiple parameters, click Write All Parameters to copy the parameter values to the servo.
To update specific parameters, click Write Selected Item(s). Selected parameters will be highlighted by a blue box, as shown below:
