Read Parameters with MC_ReadParameter
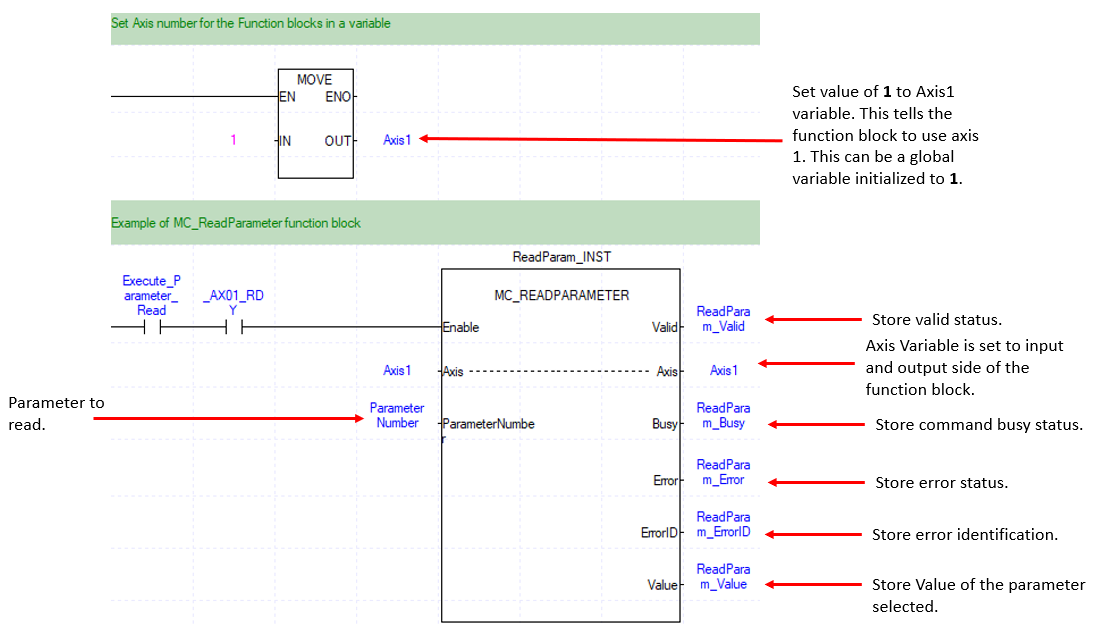
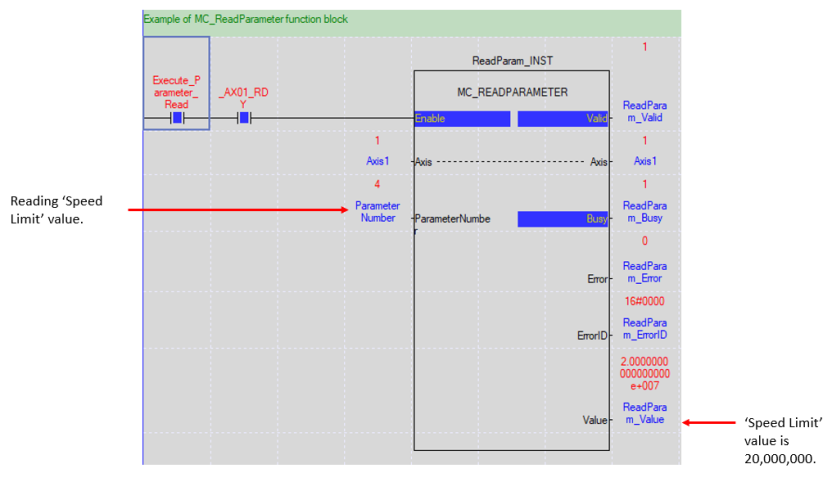
MC_ReadParameter is used to read a specific parameter of the selected axis. Value will be constantly updated while the Enable input is true. The ParameterNumber input value can be changed to read another parameter while the function block is enabled.
-
LS_Connect must be executed before this function block can be used.
-
The examples in this topic can be found in the XMC_SingleAxis_FBs.zip downloadable from Example Applications.
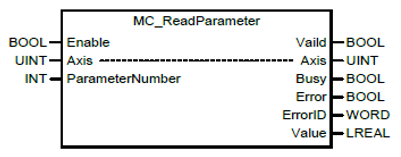
| Element Name | Element Type | Description |
|---|---|---|
| Enable | Input | Level detected request to execute the function block. |
| Axis | Input/Output | Axis reference variable. This can not be a constant. |
| ParameterNumber | Input | Specify the number of the parameter to read. See Parameter Number table for parameter numbers. |
| Valid | Output | Status that the current outputted value is valid. |
| Busy | Output | Indicates the function block is currently being executed. |
| Error | Output | Indicates whether an error occurs or not. |
| ErrorID | Output | Error Identification number. |
| Value | Output | Value of the parameter number. |
| No. | Parameter | Item | Note | OS** |
|---|---|---|---|---|
| 0 | Basic Setting | Unit | 0: pulse, 1: mm, 2: inch, 3:degree | - |
| 1 | 1 Pulse per revolution | 1 ~ 4,294,967,295[pulse] | - | |
| 2 | 1 Travel per rotation | 0.000000001 ~ 4,294,967,295 [Unit] | - | |
| 3 | Speed command unit | 0: Unit/sec, 1: Unit/min, 2: rpm | - | |
| 4 | Speed limit value | LREAL Positive number [Unit/s, rpm] Change according to Unit, Pulses per rotation, Travel per rotation, Speed command unit | - | |
| 5 | Emergency stop deceleration | 0 or LREAL Positive number [Unit/s2] | - | |
| 6 | Encoder select | 0:Incremental Encoder,1:Absolute Encoder | - | |
| 7 | Gear ratio (Motor) | 1 ~ 65,535 | - | |
| 8 | Gear ratio (Machine) | 1 ~ 65,535 | - | |
| 9 | Operation mode of the reverse rotation | 0: Deceleration stop, 1: Prompt stop | - | |
| 46 | Position Control Range Expansion | 0: Disable, 1: Enable | - | |
| 47 | Operation mode of Speed Control | 0: CSP(Cyclic Sync. Position), 1: CSV(Cyclic Sync. Velocity) | - | |
| 48 | Coordinate Systems Operation maximum allowable acceleration | 0 or LREAL Positive number [Unit/s2] | - | |
| 49 | Coordinate Systems Operation maximum allowable deceleration | 0 or LREAL Positive number [Unit/s2] | - | |
| 27 | NC Spindle Control Setting | Identifying range to reach the spindle rotation command speed | 0~100% | - |
| 28 | Identifying RPM to reach the spindle rotation zero speed | 0 ~ 100rpm | - | |
| 30 | NC Spindle | Select the Spindle Encoder | 0: Not Use, 1: Motor ENC, 2: Built-in ENC1, 3: Built-in ENC2, 4: EtherCAT ENC | V1.30 |
| 10 | Expansion Setting | S/W upper limit | LREAL* [units] | - |
| 11 | S/W low limit | LREAL* [units] | - | |
| 12 | Infinite running repeat position | LREAL Positive number [Unit] | - | |
| 13 | Infinite running repeat | 0:disabled,1:enabled | - | |
| 14 | Command Inposition range | 0 or Long real (LREAL) positive number*1) [Unit] | - | |
| 15 | Exceeding value of tracking error | 0 or Long real (LREAL) positive number*1) [Unit] | - | |
| 16 | Current position compensation amount | 0 or Long real (LREAL) positive number*1) [Unit] | - | |
| 17 | Current speed filter time constant | 0 ~ 100 | - | |
| 18 | Error reset monitoring time | 1 ~ 1000 [ms] | - | |
| 19 | S/W limit during speed control | 0: Not detect , 1: detect | - | |
| 20 | Tracking error level | 0: Warning, 1: Alarm | - | |
| 21 | Jog high speed | LREAL Positive number (Jog low speed ~speed limit ) [Unit/s] | - | |
| 22 | Jog low speed | LREAL Positive number ( < Jog high speed) [Unit/s] | - | |
| 23 | JOG Acceleration | 0 or LREAL Positive number [Unit/s2] | - | |
| 24 | JOG Deceleration | 0 or LREAL Positive number [Unit/s2] | - | |
| 25 | JOG Jerk | 0 or LREAL Positive number [Unit/s3] | - | |
| 26 | Override mode | 0: Specified by ratio, 1: Specified by unit | - | |
| 29 | Backlash compensation amount | 0 or Long real (LREAL) positive number*1) [Unit] | V1.30 | |
| 31 | Axis Setting | Number of pulses per rotation of the spindle EtherCAT encoder | 1 ~ 4294967295 | V1.30 |
| 32 | Spindle EtherCAT encoder position variable | 0: I device, 1: M device | V1.30 | |
| 33 | Spindle EtherCAT encoder position address | 0~4095 (Spindle EtherCAT encoder position variable = 0: I) 0~524287 (Spindle EtherCAT encoder position variable = 1: M) | V1.30 | |
| 34 | The P Gain of the Spindle Positioning Mode | 1~500 Hz | V1.30 | |
| 35 | The Feed Forward Gain of the Spindle Positioning Mode | 0~100 % | V1.30 | |
| 36 | NC Spindle Home Setting | How to conduct the homing operation | 0: Servo drive supported, 33:Reverse direction, Z phase, 34: Forward direction, Z phase, 35: Set the homing of the current position | V1.30 |
| 37 | Switch navigation speed of the homing operation | LREAL Positive number | V1.30 | |
| 38 | Zero navigation speed of the homing operation | Zero navigation speed of the origin operation ≤ Switch navigation speed of the origin ≤ Limit value of speed | V1.30 | |
| 39 | Acceleration/deceleration of the homing operation | 0 or LREAL Positive number [Unit/s2] | V1.30 | |
| 40 | Z phase variable | 0: I device, 1: M device | V1.30 | |
| 41 | Z phase address |
0~131071 (Z phase variable = 0: I) 0~16777215 (Z phase variable = 0: M) |
V1.30 | |
| 42 | Orientation velocity | Long real (LREAL) positive number*) (≤ Limit value of speed) | V1.30 | |
| 43 | Orientation direction | 0:forward direction , 1:reverse direction | V1.30 | |
| 44 | Orientation offset | 0~360 | V1.30 | |
| 100 | Built-in Encoder Setting | Encoder 1 unit | 0: pulse, 1: mm, 2: inch, 3:degree | - |
| 101 | Encoder 1 pulse per rotation | 1 ~ 4,294,967,295[pulse] | - | |
| 102 | Encoder 1 travel per rotation | 0.000000001 ~ 4,294,967,295 [Unit] | - | |
| 103 | Encoder 1 pulse input |
0:CW/CCW 1 multiplier, 1:PULSE/DIR 1 multiplier 2: Pulse/Dir 2 multiplier, 3: Phase A/B 1 multiplier 4: Phase A/ B 2 multiplier, 5: Phase A/B 4 multiplier |
- | |
| 104 | Encoder 1 max. value | (Encoder1 min. value + 1) ~ 2147483647 | - | |
| 105 | Encoder 1 Min. value | -2147483648~(Encoder1 Max. value-1) | - | |
| 106 | Encoder 1 input filter value |
0: Disable 1: 500kPPS 2: 200kPPS 3: 100kPPS 4: 10kPPS 5: 1kPPS 6: 0.1kPPS |
- | |
| 107 | Encoder 1 Speed unit | 0: Unit/sec, 1: Unit/min, 2: rpm | V1.10 | |
| 108 | Encoder 1 position filter time constant | 0 ~ 1000 ms | V1.10 | |
| 109 | Encoder 1 Position Latch | 0: Disable, 1: Able | V1.40 | |
| 200 | Encoder 2 unit | 0: pulse, 1: mm, 2: inch, 3:degree | - | |
| 201 | Encoder 2 1 pulse per rotation | 1 ~ 4,294,967,295[pulse] | - | |
| 202 | Encoder 2 1 travel per rotation | 0.000000001 ~ 4,294,967,295 [Unit] | - | |
| 203 | Encoder 2 pulse input |
0:CW/CCW 1 multiplier 1:PULSE/DIR 1 multiplier 2: Pulse/Dir 2 multiplier 3: Phase A/B 1 multiplier 4: Phase A/ B 2 multiplier 5: Phase A/B 4 multiplier |
- | |
| 204 | Encoder 2 max. value | (Encoder2 min. value + 2) ~ 2147483647 | - | |
| 205 | Encoder 2 Min. value | -2147483648~(Encoder2 Max. value-1) | - | |
| 206 | Encoder 2 input filter value |
0: Disable 1: 500kPPS 2: 200kPPS 3: 100kPPS 4: 10kPPS 5: 1kPPS 6: 0.1kPPS |
- | |
| 207 | Encoder 2 Speed unit | 0: Unit/sec, 1: Unit/min, 2: rpm | V1.10 | |
| 208 | Encoder 2 position filter time constant | 0 ~ 1000 ms | V1.10 | |
| 209 | Encoder 2 Position Latch | 0: Disable, 1: Able | V1.40 |
Notes:
* - LREAL range: 2.2250738585072e-308 ~ 1.79769313486232e+308, LREAL positive range: 0 < x ≤1.79769313486232e+308
** - OS version is the version information to which the parameter is applicable.
//Set axis reference
Axis1 := 1;
IF (_AX01_RDY) THEN /
//Example of MC_ReadParameter fb
INST_READPARAMETER(Enable:=Execute_Read, Axis:=Axis1,
ParameterNumber:=INST_READPARAMETER.ParameterNumber,
ErrorID=>INST_READPARAMETER.ErrorID, Value=>INST_READPARAMETER.Value);
END_IF;
LM518