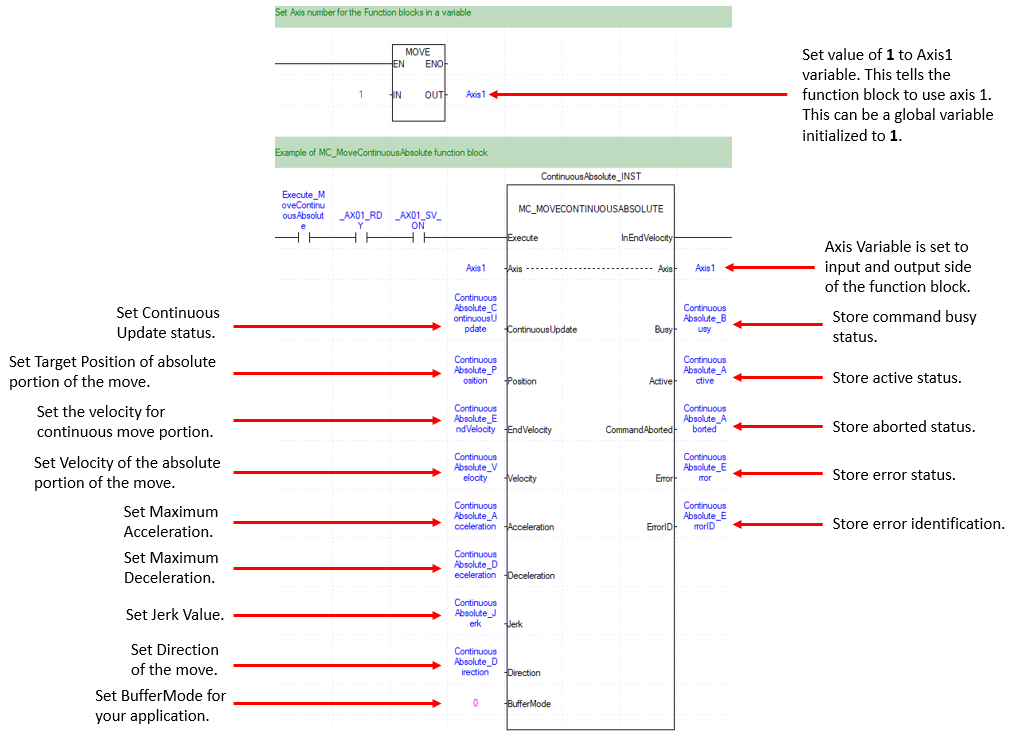
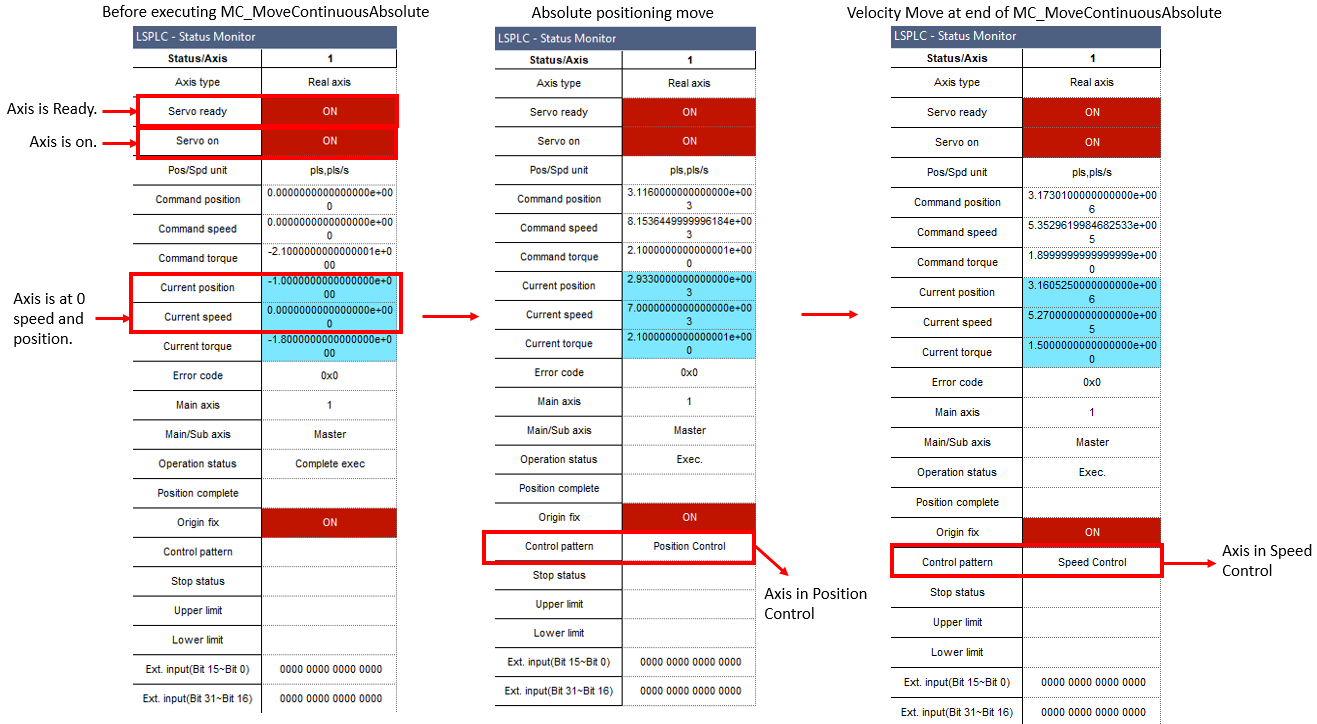
Absolute Positioning that ends with a velocity move using MC_MoveContinuousAbsolute
MC_MoveContinuousAbsolute will perform an absolute move and transition to a velocity move when absolute positioning is complete. The value in the input EndVelocity will be the final speed for the continuous speed portion of the movement. If the function block is executed again while performing a previous MC_MoveContinuousAbsolute operation, the changes in parameters will be applied.
-
When using ‘infinite running repeat position’, Direction = 2 for shortest distance can be used to have the function block select the direction for shortest move.
-
This function block will cause the axis to transition to ContinuousMotion state.
-
The sign of the EndVelocity value will determine the direction of the speed move portion.
-
A negative EndVelocity value will move in the reverse direction and a positive EndVelocity value will move in the forward direction.
-
LS_Connect, MC_Power, and MC_Home must be executed before this function block can be used.
-
The examples in this topic can be found in the XMC_SingleAxis_FBs.zip downloadable from Example Applications.
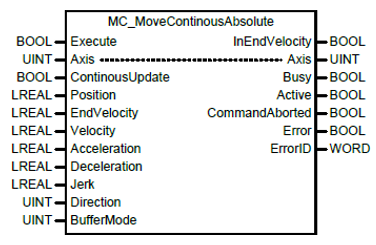
| Element Name | Element Type | Description |
|---|---|---|
| Execute | Input | Edge detected request to execute the function block. |
| Axis | Input/Output | Axis reference variable. This can not be a constant. |
| ContinuousUpdate | Input | Specify the update setting of the input value. This is explained in section 6.1.5 of the XMC user manual. |
| Position | Input | Specify the target position for the absolute move portion. |
| EndVelocity | Input | Specify the speed of the continuous movement portion. |
| Velocity | Input | Specify the maximum speed of the move. |
| Acceleration | Input | Specify the acceleration of the move. |
| Deceleration | Input | Specify the deceleration of the move. |
| Jerk | Input | Specify the change rate of acceleration and deceleration. |
| Direction | Input |
Specify the direction of the move.
|
| BufferMode | Input | Specify the sequential operation setting. See Buffer Mode table below. |
| InEndVelocity | Output | Indicates the axis has transitioned to continuous speed movement. |
| Busy | Output | Indicates the function block is currently being executed. |
| Active | Output | Indicates the function block is controlling the axis. |
| CommandAborted | Output | Indicates the function block was aborted. |
| Error | Output | Indicates whether an error occurs or not. |
| ErrorID | Output | Error Identification number. |
BufferMode Table
Sections 6.1.4 and 8.2.10 of the XMC user manual provide more information about buffer modes.
| Value | Buffer Mode | Description |
|---|---|---|
| 0 | Aborting | Abort previous command and execute the command immediately. |
| 1 | Buffered | Execute the command after previous command is completed. |
| 2 | BlendingLow | The new command is blended into a previously executed command using the lower velocity value when comparing the previous command and new command. |
| 3 | BlendingPrevious | The new command is blended into a previous command using the velocity of the previous command. |
| 4 | BlendingNext | The new command is blended into a previous command using the velocity from the new command. |
| 5 | BlendingHigh | The new command is blended into a previous command using the higher velocity value when comparing the previous command and new command. |
//Set axis reference
Axis1 := 1;
IF (_AX01_RDY) AND (_AX01_SV_ON) AND (_AX01_HOME_CMPL) THEN
//Example MC_MoveContinuousAbsolute fb
INST_MOVECONTINUOUSABSOLUTE(Execute:=Execute_MoveContAbs, Axis:=Axis1,
ContinuousUpdate:=0, Position:=INST_MOVECONTINUOUSABSOLUTE.Position,
EndVelocity:=INST_MOVECONTINUOUSABSOLUTE.EndVelocity, Velocity:=INST_MOVECONTINUOUSABSOLUTE.Velocity, Acceleration:=INST_MOVECONTINUOUSABSOLUTE.Acceleration, Deceleration:=INST_MOVECONTINUOUSABSOLUTE.Deceleration, Jerk:=INST_MOVECONTINUOUSABSOLUTE.Jerk,
Direction:=INST_MOVECONTINUOUSABSOLUTE.Direction, BufferMode:=0,
ErrorID=>INST_MOVECONTINUOUSABSOLUTE.ErrorID);
END_IF;
LM513