readDrive CM Configuration of L7C
Use Drive CM to Configure the L7C. The following examples are used with the example project XEM_L7C_ModRTU_Example.zip which can be downloaded from Example Applications.
| Step | Action |
|---|---|
| 1 |
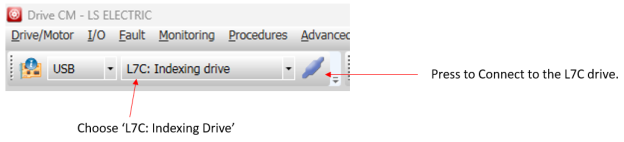
Open Drive CM and connect to the L7C with a USB mini-B cable. Press the Online to Offline icon to go online with the drive.
|
| 2 |
On the Basic tab of the Object Dictionary, configure Parameter 0x2003 with a Node ID. Must be different from the XEM CPU. This example uses Node ID of 2. Press enter after changing the value to send it to the drive. Unsent values will display in red text.
|
| 3 |
On the Index tab, configure Parameter 0x3002 to set the Baud-rate of the connection. This example is set to 1 which is 19.2 kbps. Data bits, Stop bits, and Parity is fixed at 8, 1, None. Note: For best results and communication stability, do not use baud rates higher than 19,200 with the L7C Servo.
|
| 4 |
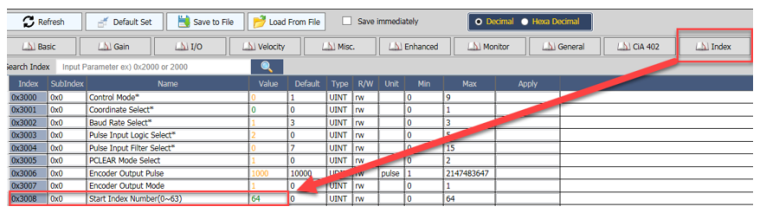
Also on the Index tab, configure Parameter 0x3000 to be the value of 0. This will put the L7C in 0: Index Position Mode.
|
| 5 |
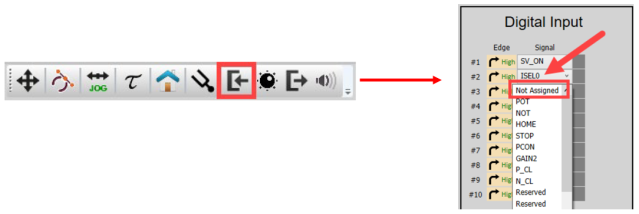
Clear the Digital Input list of SV_ON, ISEL0, ISEL1, ISEL2, ISEL3, ISEL4, and ISEL5. This can be done by selecting Not Assigned.
|
| 6 |
Configure Parameter 0x3008 with a Start Index Number of 64. This will configure the index to be run to be defined by ISEL0 - ISEL5. Any value less than 64 in this register will cause that index to run when the START input is triggered.
|
| 7 |
Press the Save to Memory icon to save the parameter changes to the EEPROM.
|
| 8 |
Press the Software Reset icon to allow the change in Control Mode to take effect.
|