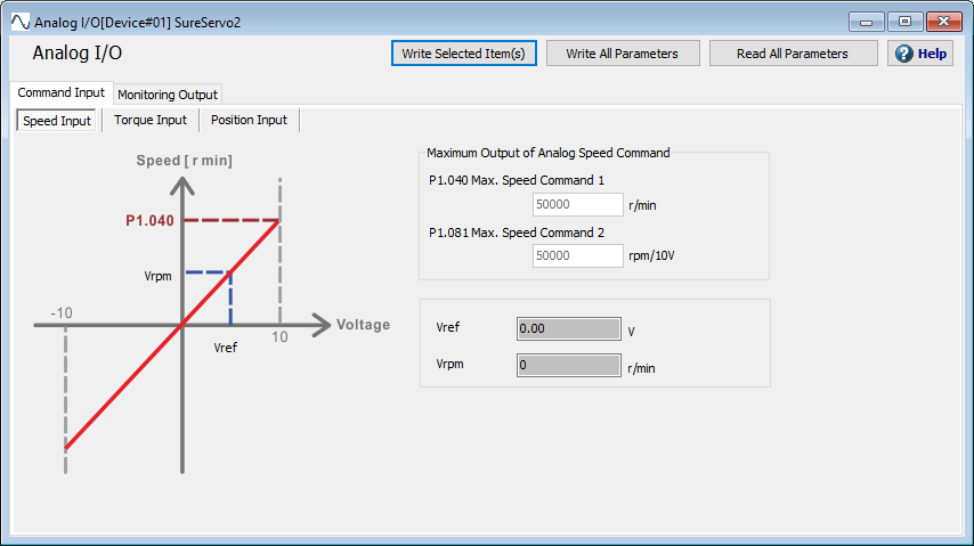
The Speed Input tab allows you to adjust the maximum speed commands as well as view servo system voltage and rpm values in real-time.
| Option | Function |
|---|---|
| Maximum Speed Command 1 | P1.040 sets the maximum rotation speed corresponding to 10V (maximum voltage) for the analog speed command. The default is 3000rpm with possible settings from 0 to 50,000 rpm. |
| Maximum Speed Command 2 | P1.081 also sets the maximum rotation speed corresponding to 10V (maximum voltage) for the analog speed command when DI.SPDKVC is ON. The Digital Input SPDKVC (0x0F) allows you to switch from using one analog input scaling to a second, independent analog input scaling. |
| Vref | Displays the velocity reference value from the servo system in real time, in Volts. |
| Vrpm | Displays the actual velocity of the motor in real time, in RPM. |