Electronic gearing allows you to control how many pulses your controller needs to send to get one revolution of the motor. This is accomplished by setting the E-gear Ratio. The value in P1.045 sets the number of pulse user units (PUU) needed to rotate the motor shaft one full rotation. This value acts as the denominator with the N1, N2, N3, or N4 parameter to provide the electronic gear ratio used by the system to convert incoming PUUs to the correct number of shaft rotations. The default Numerator is 16777216 (the native motor encoder resolution) and the default P1.045 Denominator is 100,000. With default settings, if the PLC sends 100,000 pulses the motor will turn one revolution. For PLCs with less than 1MHz pulse output frequency, the denominator may need to be reduced.
You can load the current parameter values to the text boxes by clicking Read All Parameters.
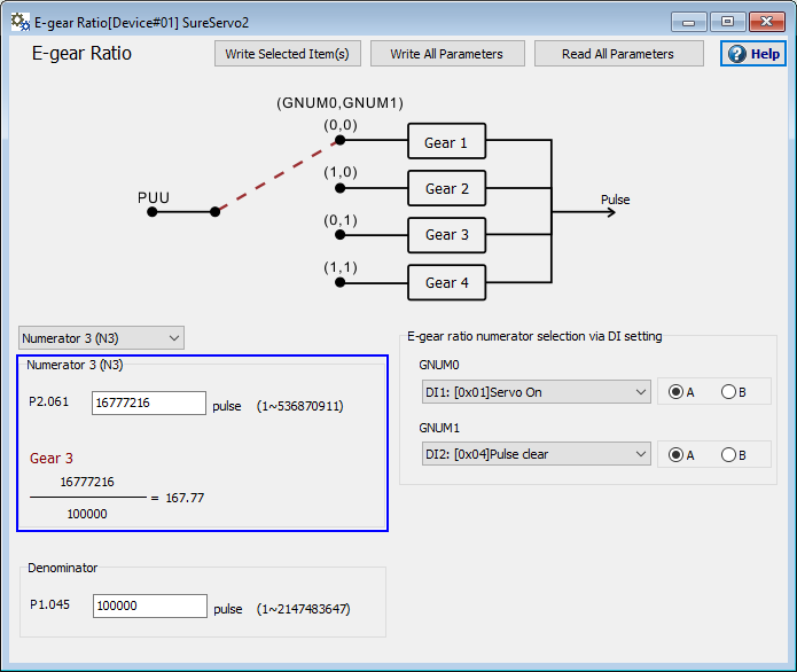
Parameter data can be adjusted by typing a new value in the appropriate text box. To update multiple parameters, click Write All Parameters to copy the parameter values to the servo. To update specific sets of parameters, click Write Selected Item(s). Selected parameters will be highlighted by a blue box as shown above.
| Option | Function |
|---|---|
| Numerator 1, 2, 3, and 4 | P1.044, P2.060, P2.061, and P2.062 set the numerator for the E-gear ratio by using GNUM0 and GNUM1. If GNUM0 and GNUM1 are not defined, the numerator will be defined by P1.044. The system default is 16777216, with possible settings from 1 to 229-1 |
| Denominator | P1.045 sets the E-Gear Ratio (Denominator)(M) for all e-gear ratio calculations. The default value is 100000 which results in 1 rotation per 100000 PUU. Possible settings are 1 to 231-1. |
| GNUM0, GNUM1 | Used to define the numerator for N2, N3, and N4. Select a DI function from the drop down, then set Normally Open (A) or Normally Closed (B). |