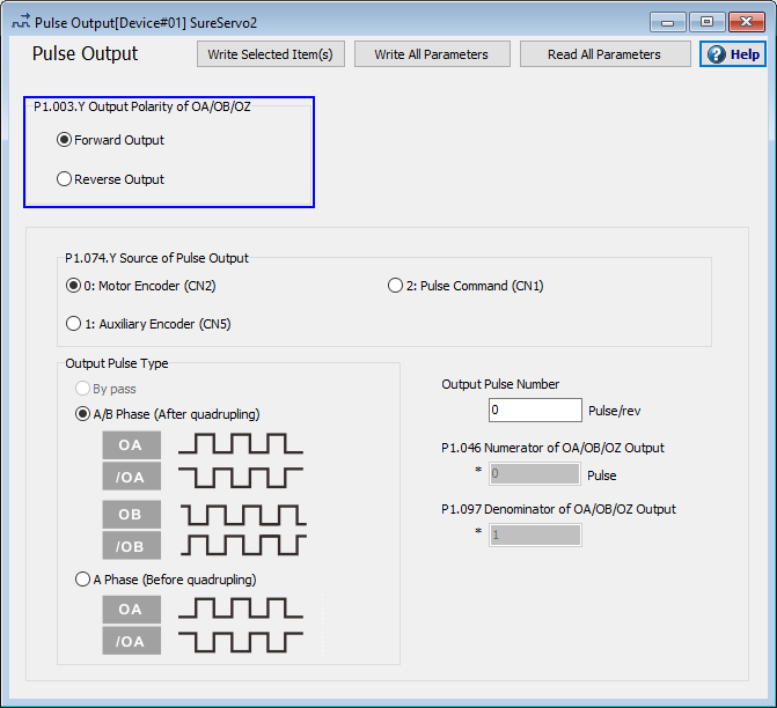
The Pulse Output screen allows you to configure the servo drive's encoder output signal. On this creen, you can define the output polarity, source of pulse output, output pulse type, and output pulse number for your servo system.
Options available on the Pulse Output screen are:
| Option | Function |
|---|---|
| Output Polarity of OA/OB/OZ | P1.003.Y lets you choose between forward and reverse output. |
| Source of Pulse Output | P1.074.Y selects the source of pulse output from Motor Encoder, Auxiliary Encoder, or Pulse Command |
| Output Pulse Type | Select either A/B Phase or A Phase pulse type. You can also opt to bypass the pulse type. |
| Output Pulse Number | Configure the pulses per rev for the encoder output signal. Only integers are allowed in the Output Pulse Number field. This value is copied into P1.046. If you need a non-integer pulse per rev output value, please use the Parameter Editor to enter a value other than "1" in the P1.097 Denominator parameter. |
You can load the current parameter settings on the servo by clicking Read All Parameters.
Settings can be adjusted by selecting the appropriate radio button or typing a new value in the text box. To update multiple settings, click Write All Parameters to copy the parameter values to the servo.
To update specific settings, click Write Selected Item(s). Selected parameters will be highlighted by a blue box, as shown below:
