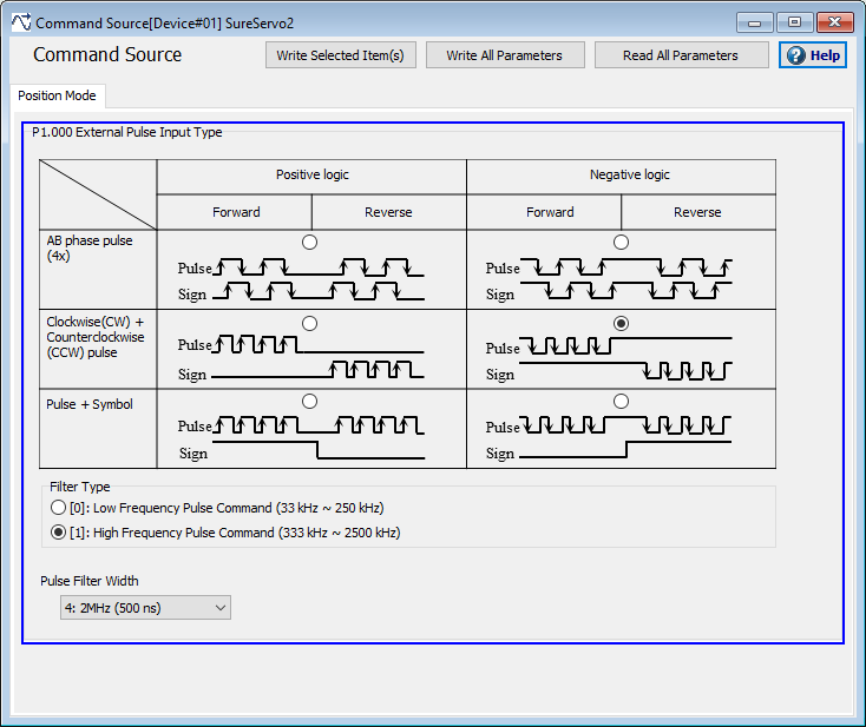
The Command Source screen in PT Mode allows you to adjust the external pulse input type, filter type, and pulse filter width.
Video Resources:
| Option | Function |
|---|---|
| P1.000 External Pulse Input Type | Select one of the six radio buttons to choose either positive or negative logic with AB phase pulse, CW +CCW pulse, or pulse + symbol inputs. |
| Filter Type | Select either low frequency or high frequency pulse commands |
| Pulse Filter Width | Select a pulse filter width from 125Hz to 5mHz. Choose 0 to bypass. |