LS_HomeAll Overview
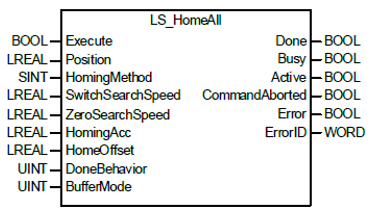
| Element Name | Element Type | Description |
|---|---|---|
| Execute | Input | Edge detected request to execute the function block. |
| Position | Input | Specify the position of the axes when the reference signal is detected. |
| HomingMethod | Input | Set Homing Method supported by servo drives. |
| SwitchSearchSpeed | Input | Set the switch search speed. |
| ZeroSearchSpeed | Input | Set the zero search speed. |
| HomingAcc | Input | Set Acceleration/Deceleration used during homing. |
| HomeOffset | Input | Set home offset position. |
| DoneBehavior | Input | Set movement after homing is done.This setting only works for certain LS Electric servo drives. See user manual for your specific servo drive for more information. |
| BufferMode | Input | Specify the sequential operation setting of the function block. See BufferMode Table. |
| Done | Output | Indicates the operation of the function block is finished. |
| Busy | Output | Indicates the function block is currently being executed. |
| Active | Output | Indicates the function block is controlling the axes. |
| CommandAborted | Output | Indicates the function block execution was aborted. |
| Error | Output | Indicates whether an error occurs or not. |
| ErrorID | Output | Error Identification number. |

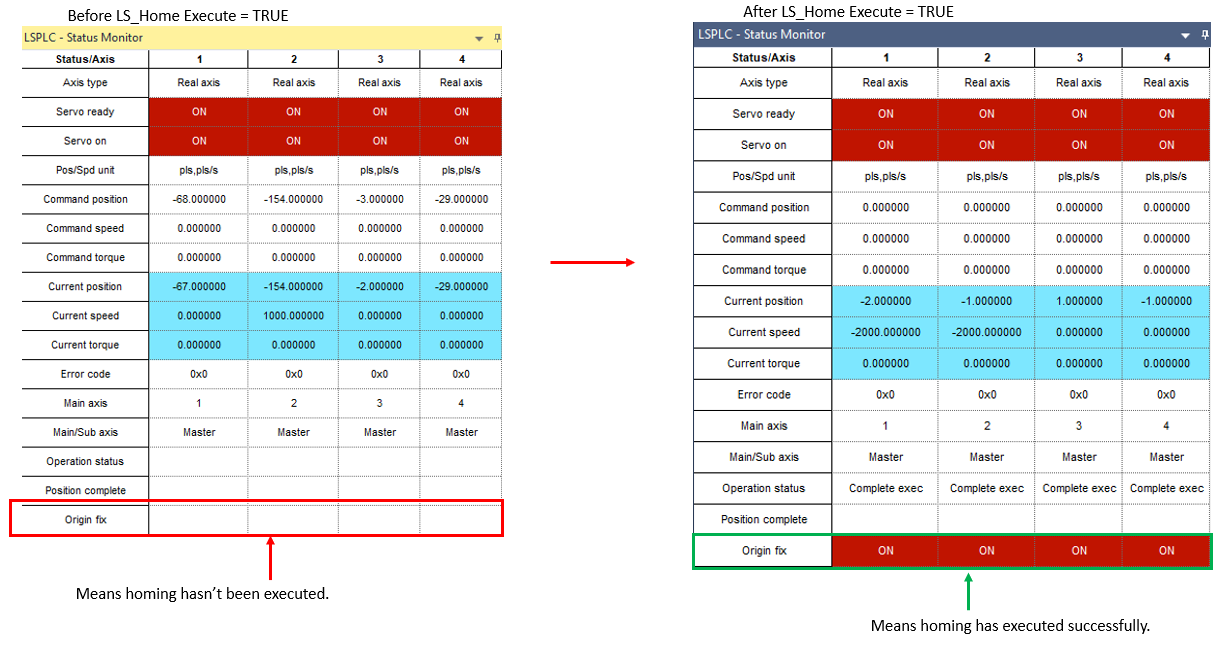
//Check that all axes are ready
IF (_AX01_RDY) AND (_AX02_RDY) AND (_AX03_RDY) AND (_AX04_RDY) THEN
All_Axes_Ready := TRUE;
ELSE
All_Axes_Ready := FALSE;
END_IF;
//Check that all axes are powered on
IF (_AX01_SV_ON) AND (_AX02_SV_ON) AND (_AX03_SV_ON) AND (_AX04_SV_ON) THEN
All_Axes_Pwr_On := TRUE;
ELSE
All_Axes_Pwr_On := FALSE;
END_IF;
//Make sure axes are ready
IF (All_Axes_Pwr_On) AND (All_Axes_Ready) THEN
//Example of LS_HomeAll function block
INST_LS_HOMEALL(Execute:=Execute_LSHomeAll, Position:=Home_Position,
HomingMethod:=Homing_Method, SwitchSearchSpeed:=1000.0,
ZeroSearchSpeed:=100.0, HomingAcc:=100.0, HomeOffset:=0.0,
DoneBehavior:=0, BufferMode:=0, ErrorID=>INST_LS_HOMEALL.ErrorID);
END_IF;
LM601-2