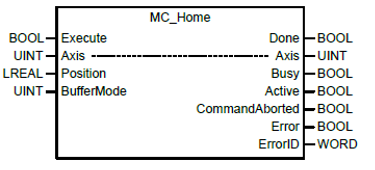
MC_Home Details
| Element Name | Element Type | Description |
|---|---|---|
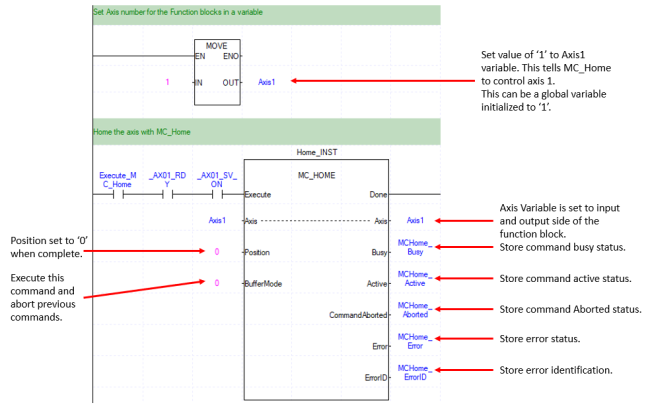
| Execute | Input | Edge detected request to execute the function block. |
| Axis | Input/Output | Axis reference variable.This can not be a constant. |
| Position | Input | Specify the position of the axis when the reference signal is detected. |
| BufferMode | Input | Specify the sequential operation setting of the function block. See BufferMode Table. |
| Done | Output | Indicates the operation of the function block is finished. |
| Busy | Output | Indicates the function block is currently being executed. |
| Active | Output | Indicates the function block is controlling the selected axis. |
| CommandAborted | Output | Indicates the function block execution was aborted. |
| Error | Output | Indicates whether an error occurs or not. |
| ErrorID | Output | Error Identification number. |
Sections 6.1.4 and 8.2.10 of the XMC user manual provide more information about buffer modes.
| Value | Buffer Mode | Description |
|---|---|---|
| 0 | Aborting | Abort previous command and execute the command immediately. |
| 1 | Buffered | Execute the command after previous command is completed. |
| 2 | BlendingLow | The new command is blended into a previously executed command using the lower velocity value when comparing the previous command and new command. |
| 3 | BlendingPrevious | The new command is blended into a previous command using the velocity of the previous command. |
| 4 | BlendingNext | The new command is blended into a previous command using the velocity from the new command. |
| 5 | BlendingHigh | The new command is blended into a previous command using the higher velocity value when comparing the previous command and new command. |
See iX7NH manual for timing charts for these supported homing methods.
| Homing Method Number | Description |
|---|---|
| 1 | The drive returns to the home position by the negative limit switch (NOT) and the Index (Z) pulse while driving in the negative direction. |
| 2 | The drive returns to the home position by the positive limit switch (POT) and the Index (Z) pulse while driving in the positive direction. |
| 7,8,9,10 | The drive returns to the home position by the home switch (HOME) and the Index (Z) pulse while driving in the positive direction. When the positive limit switch (POT) is input during homing, the drive switches its driving direction. |
| 11,12,13,14 | The drive returns to the home position by the home switch (HOME) and the Index (Z) pulse while driving in the negative direction. When the negative limit switch (NOT) is input during homing, the drive switches its driving direction. |
| 24 | The drive returns to the home position by the home switch (HOME) while driving in the positive direction. When the positive limit switch (POT) is input during homing, the drive switches its driving direction. |
| 28 | The drive returns to the home position by the home switch (HOME) while driving in the negative direction. When the negative limit switch (NOT) is input during homing, the drive switches its driving direction. |
| 33 | The drive returns to the home position by the Index (Z) pulse while driving in the negative direction. |
| 34 | The drive returns to the home position by the Index (Z) pulse while driving in the positive direction. |
| 35 | Sets the current position as the home position. |
| -1 | The drive returns to the home position by the negative stopper and the Index (Z) pulse while driving in the negative direction. |
| -2 | The drive returns to the home position by the positive stopper and the Index (Z) pulse while driving in the positive direction. |
| -3 | The drive returns to the home position only by the negative stopper while driving in the negative direction. |
| -4 | The drive returns to the home position only by the positive stopper while driving in the positive direction. |
| -5 | The drive returns to the home position only with the home switch (HOME) while driving in the negative direction. |
| -6 | The drive returns to the home position only with the home switch (HOME) while driving in the positive direction. |
| Step | Action |
|---|---|
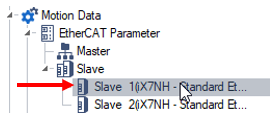
| 1 |
In the Motion Data è EtherCAT Parameter è Slave section, double-click on the slave to modify.
|
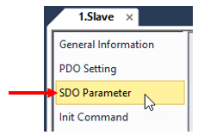
| 2 |
Select SDO Parameter in the Slave window that opens up.
|
| 3 |
Find the Homing Method parameter. Some servo drives will support modifying Homing speeds and Homing Acceleration.
|
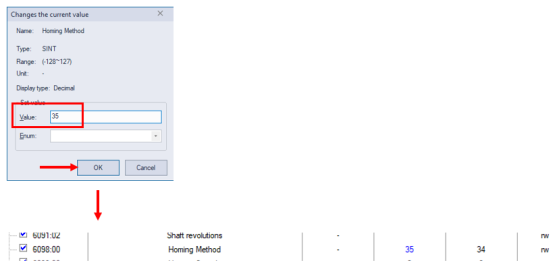
| 4 |
Double-click on the Set value column to open a pop-up window.
|
| 5 |
Enter the Homing method value from the chart in LS Electric iX7NH Supported Homing Methods. Press OK when done.
|
| 6 | Save your project. Write it to your project if you are ready to test your code. |



//Set Axis1 reference variable
Axis1 := 1;
//check that axis 1 is ready
IF (_AX01_RDY) AND (_AX01_SV_ON) THEN
//Example MC_Home fb
INST_MC_HOME(Execute:=Execute_MCHome, Axis:=Axis1,
Position:=INST_MC_HOME.Position, BufferMode:=0,
ErrorID=>INST_MC_HOME.ErrorID);
END_IF;
LM502-1