XMC EtherCAT Remote I/O with XEL-BSSCT
The XMC supports I/O expansion with Modbus TCP or EtherCAT bus couplers.
-
Automation Direct offers the XEL-BSSRT as a Modbus TCP bus coupler.
-
Automation Direct offers the XEL-BSSCT as an EtherCAT bus coupler.
This topic will cover adding remote I/O to the XMC using the XEL-BSSCT.
The XEL-BSSCT is an EtherCAT bus coupler that uses XGB I/O modules. An XG5000 program is used to configure the XEL-BSSCT and which I/O modules are connected to it. XG5000 automatically contains the ESI file for the XEL-BSSCT.
For other software systems the ESI file may be downloaded here.
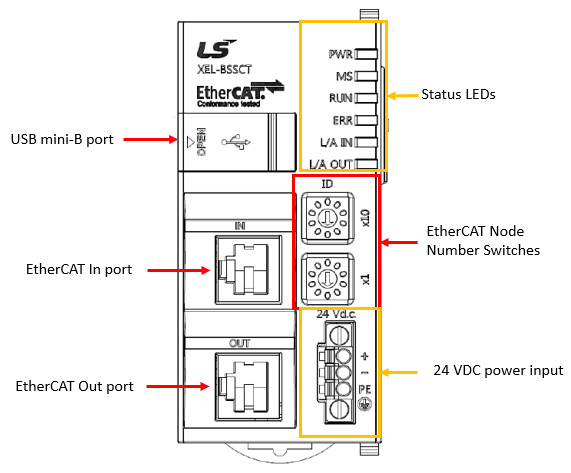
XEL-BSSCT Status LEDs
| Name | Color | Status | Normal/ Error |
Operation by Status | |
|---|---|---|---|---|---|
| PWR | Red | Off | - | Power OFF | |
| On | - | Power ON | |||
| RUN | Green | Off | - | INIT status | |
| Blinking | - | PRE-OP status | |||
| Single Flash | - | SAFE-OP status | |||
| Flickering | - | Initialization or BOOTSTRAP status | |||
| On | - | OP status | |||
| MS | Red/Green | Green | On | - | RUN mode |
| Off | - | Error has caused STOP mode or operation is not available | |||
| Red | On | Error | Unrecoverable error has occurred | ||
| 1s Flickering | Warning | Recoverable error has occurred | |||
| 500ms Flickering | Light error | Error that has no effect on operation has occurred | |||
| 100ms Flickering | Critical error | Critical error that is halting operation has occurred | |||
| ERR | Red | Off | - | No error | |
| Blinking | Error | General setting error such as register or object setting, or invalid H/W setting | |||
| Single Flash | Error | The EtherCAT state cannot be changed to OP due to a local error | |||
| Double Flash | Error | Occurrence of sync manager watchdog timeout | |||
| Flickering | Error | Booting error | |||
| On | Error | Hardware failure has occurred | |||
| L/A IN | Green | Off | - | No connection to the Master | |
| On | - | Connection to the Master has been established but there is no communication | |||
| Flickering | - | Connection to the Master has been established and there is communication | |||
| L/A OUT | Green | Off | - | No connection to the Master | |
| On | - | Connection to the Master has been established but there is no communication | |||
| Flickering | - | Connection to the Master has been established and there is communication | |||
Set a unique node number to the XEL-BSSCT with the rotary switches. Connect the EtherCAT network from the XMC port to the IN port of the XEL-BSSCT.
| Step | Action |
|---|---|
| 1 | Connect to the XMC with an XG5000 project. |
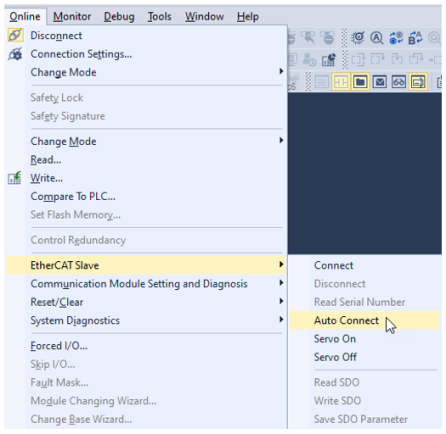
| 2 |
Select Online menu è EtherCAT Slave è Auto Connect.
|
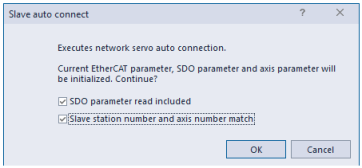
| 3 |
Select the SDO parameter read included option to read the SDO object from the devices.
|
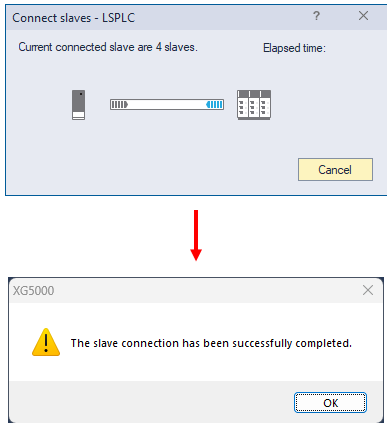
| 4 |
XG5000 will show the read status. Press OK on the status screen when reading is done.
|
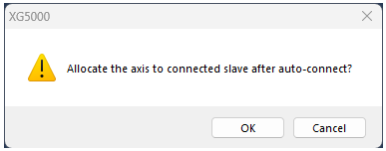
| 5 |
Press OK to set axis number to slave drive node number if that option was selected. Skip if that option was not selected.
|
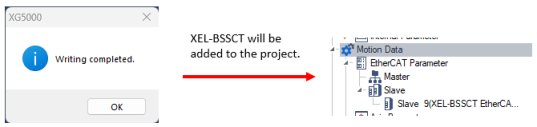
| 6 |
Press OK on Writing completed screen.
|
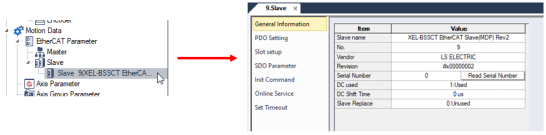
| 7 |
Double-click on the XEL-BSSCT in the Slave section to open the configuration screen.
|
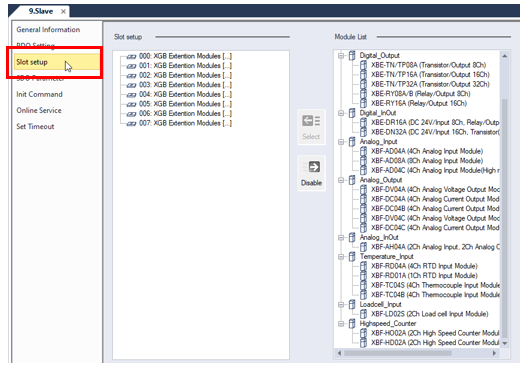
| 8 |
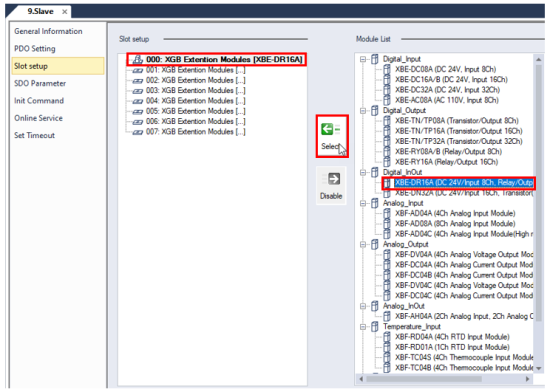
Click Slot Setup to setup the I/O modules on the XEL-BSSCT.
|
| 9 |
Add your modules by selecting the module slot under Slot setup then selecting the module in the Module List and pressing the left arrow with label Select.
|
| 10 | Write your program to the XMC. |
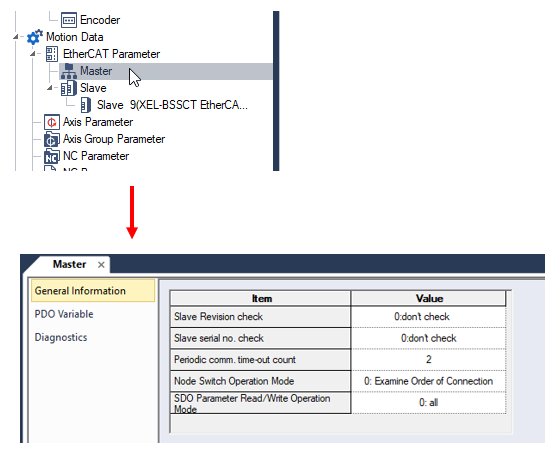
The direct variable addresses for the configured I/O can be found in the Master section of the EtherCAT Parameter section.
-
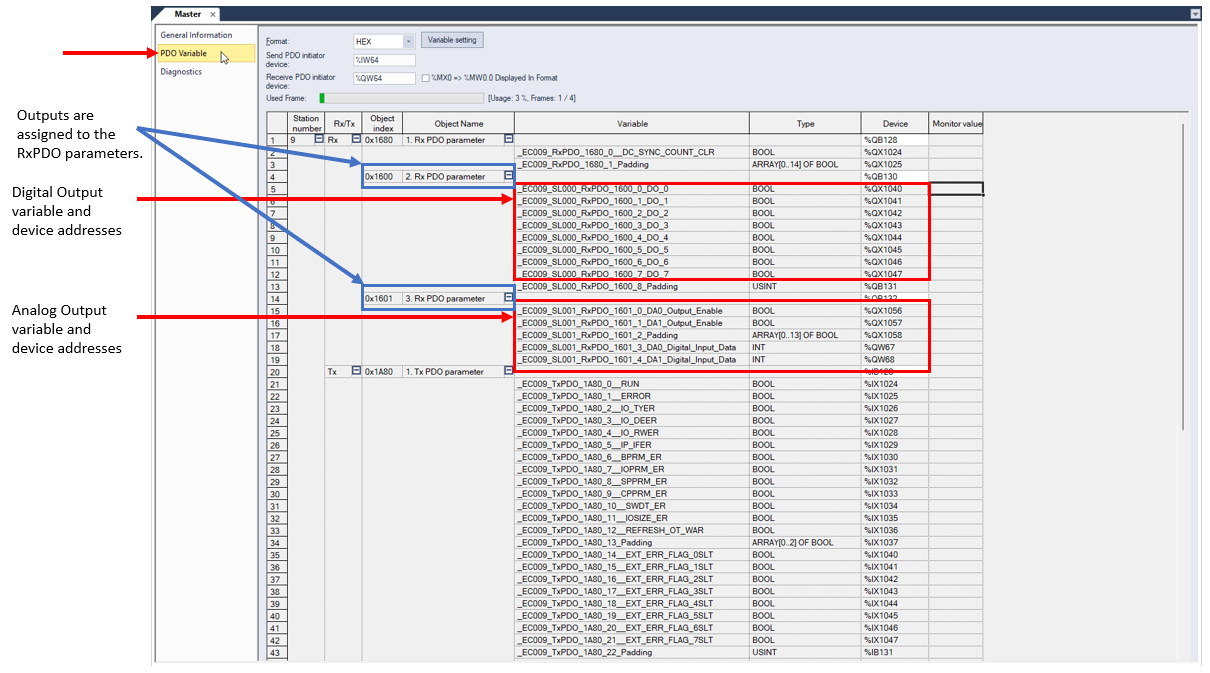
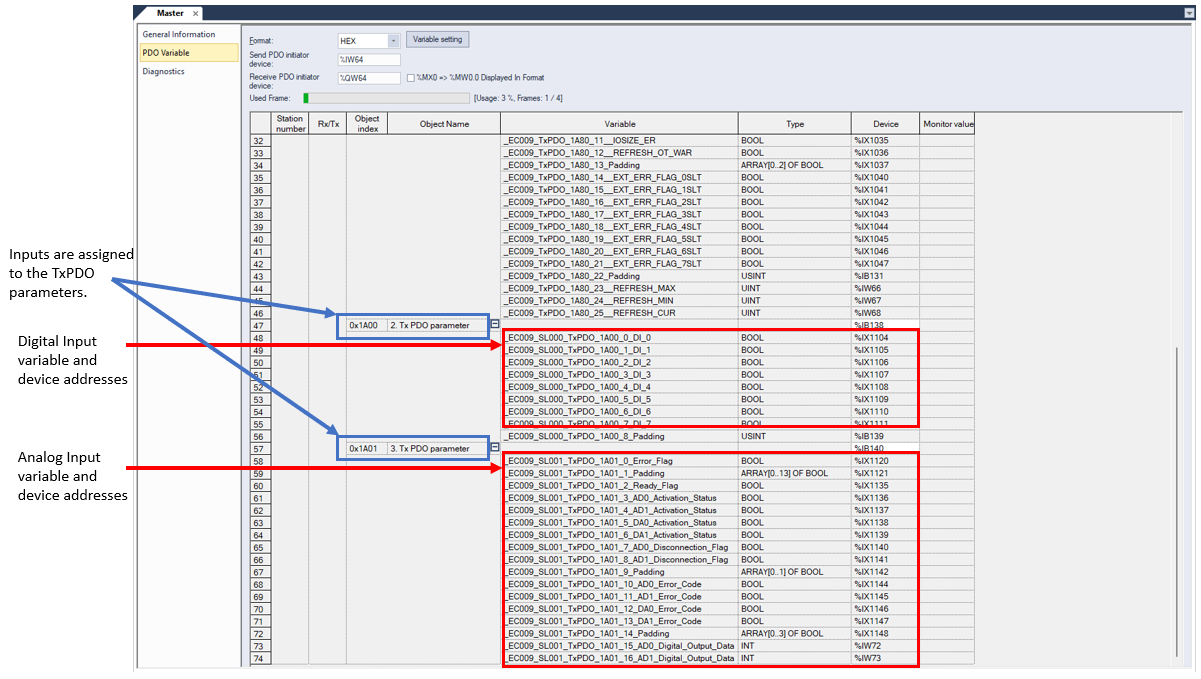
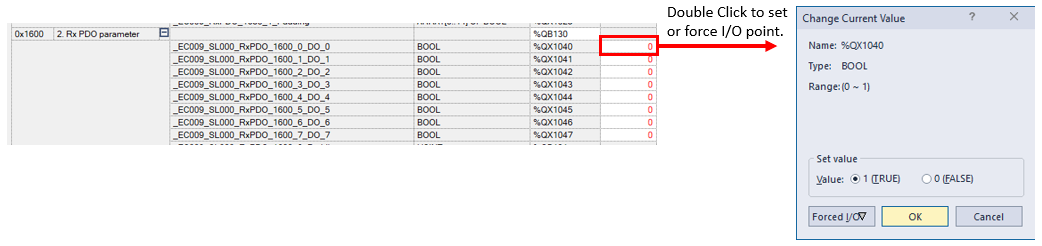
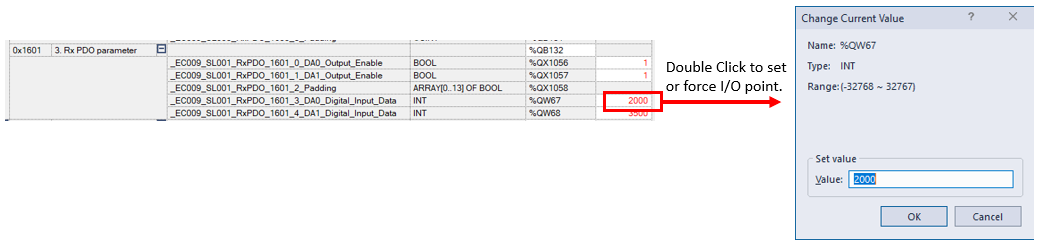
The PDO Variable section will contain the device addresses and variable names to access the data.
-
This screen can also be used to force I/O to certain values while in monitor mode.
-
The variable names will start with _ECxxx where xxx is the slave node number.
Open the Master section of the EtherCAT Parameter.
Click PDO Variable to see the I/O address list.
The EtherCAT network must be connected with LS_Connect function block or use Online menu è EtherCAT Slave è Connect. With the PDO Variable screen open, start monitoring from the Monitor menu.
LM408