EtherCAT Communication
EtherCAT stands for Ethernet for Control Automation Technology. The XMC is an EtherCAT master device.
-
EtherCAT is a high-performance industrial network system which uses Real-Time Ethernet.
-
EtherCAT provides short communication cycle time between the master and slaves by transmitting Ethernet frames at a high speed.
-
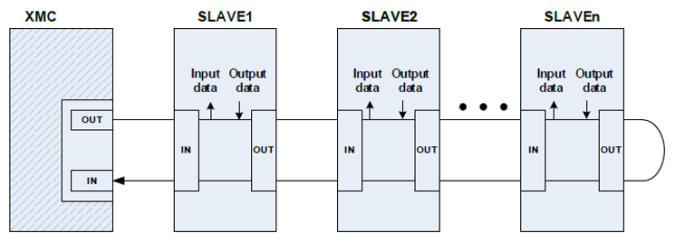
EtherCAT communication uses one frame to all slaves without transmitting data to each slave node in the network.
-
Each slave reads and writes data to its own area in the frame when a communication frame passes through.
-
The communication frame goes through the last slave and returns to the master through all the slaves.
The XMC communicates with slaves using the CANopen over EtherCAT (CoE) protocol. A CoE slave’s parameter and data information is stored in an object dictionary. The object dictionary contains information used in the configuration of the device and communication to the device.
-
A Process Data Object (PDO) is used for synchronous transmission of data between the master and slave nodes.
-
The motion controller performs synchronous process data communication to handle input/output signals and to control the position of EtherCAT servo drives.
-
A Service Data Object (SDO) is used for asynchronous transmission of data between the master and slave nodes.
-
The motion controller performs asynchronous service data communication for error information in the slave and parameter reading/writing.
-
CiA 402 is an application profile used to standardize the control of VFDs and servo drives.
-
CiA 402 describes all functional behavior including the FSA and all process data and configuration parameters.
| Type | Communication Time | Content of Communication |
|---|---|---|
| Process Data Communication (PDO) | Synchronous with main task period | Servo drive position control data, input/output data, etc. |
| Service Data Communication (SDO) | Asynchronous only when requested | Servo parameter reading/writing, servo error information reading/acknowledgement, etc. |

Communication between master and slave begins in the Init state.
-
Master configures the synchronous communication and proceeds to the Pre-operational state.
-
Master configures slave parameters to enter the Safe-Operational state.
-
Master starts sending valid outputs and the system enters Operational state.
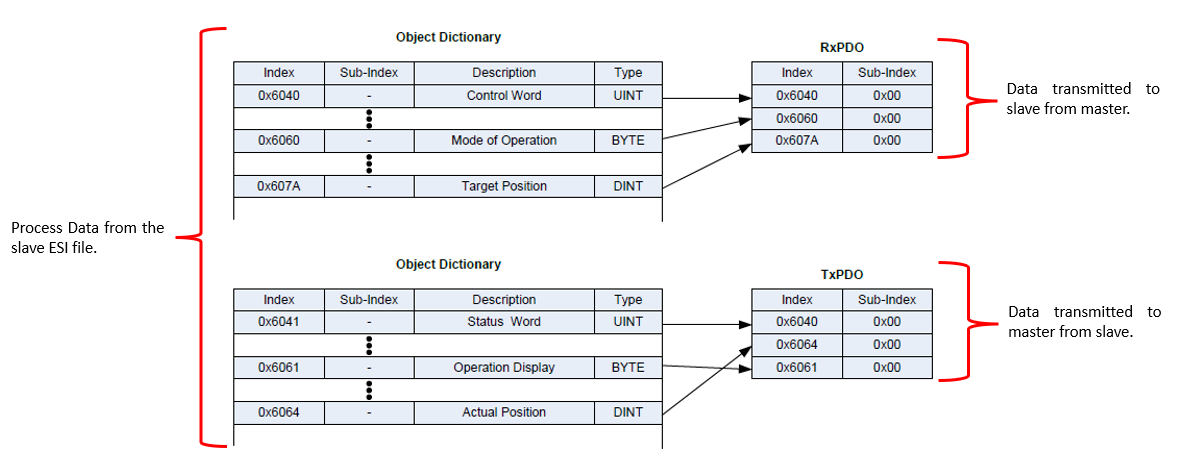
The synchronous data communication in EtherCAT communication of the motion controller occurs through process data object (PDO).
-
TxPDO is configured for data that is transmitted from the slave to the motion controller.
-
RxPDO is configured for data that is transmitted from the motion controller to the slave.
-
The manufacturer of the slave node will have an EtherCAT Slave Information (ESI) file which contains the PDO data that the slave supports.
-
This file must be imported into XG5000 for the XMC to be able to control the slave device.
Example Configuration of RxPDO and TxPDO:
| Item | Specification |
|---|---|
| Communication Protocol | EtherCAT using CANopen over EtherCAT (CoE) |
| Physical Layer | 100BASE-TX |
| Communication Speed | 100 Mbps |
| Topology | Daisy Chain.Ring Topology is supported with a Junction Slave module. |
| Maximum number of Slaves |
|
| Communication Period | 0.5 ms / 1 ms / 2 ms / 4 ms |
| Synchronous Jitter between slaves | 0.5 ms / 1 ms / 2 ms / 4 ms |
| Synchronous Communication | PDO (Process Data Object) mapping through CoE. |
| Asynchronous Communication | SDO (Service Data Object) communication through CoE. |
The XMC supports daisy chain and ring connection topologies. Branches and ring connection can be added using a junction slave. Only one junction slave may be used in the EtherCAT network.
Daisy Chain Topology with No Branches
![]()
Daisy Chain Topology using Branches
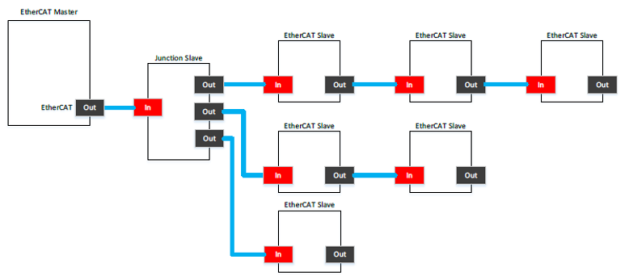
Ring Topology
Note: When using ring topology, do not use the open ports on the junction slave.

LM400