Configure Encoder Inputs in XG5000 Project
Note: This example shows the configuration of Encoder 1. Encoder 2 can be configured in the same window with the same settings using the Encoder2 group and setting names instead of Encoder1.
| Step | Action |
|---|---|
| 1 |
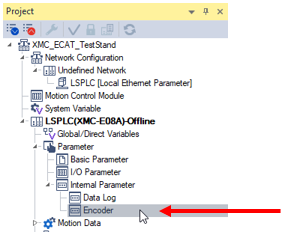
Double-click Encoder under the Internal Parameter section of the Project window.
|
| 2 |
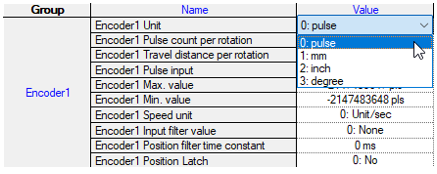
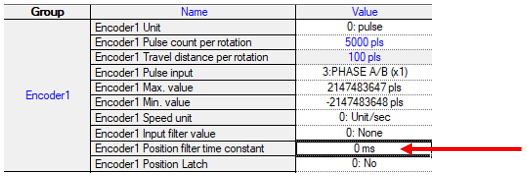
Select the unit type of Encoder 1 under Encoder1 Unit. Available options are pulse, mm, inch or degree.
|
| 3 |
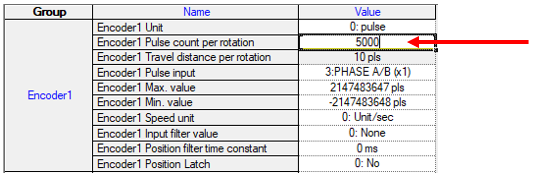
Configure the number of pulses per revolution of the encoder under Encoder1 Pulse count per rotation. This example shows a 5000 pulse per revolution encoder.
|
| 4 |
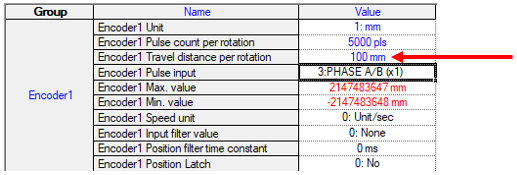
If the unit type is not pulse, then enter the distance that is traveled per one revolution of the encoder under Encoder1 Travel distance per rotation. This example shows 100 mm being traveled every 5000 pulses (one revolution of the encoder). If unit selected is pulse type, skip to step 5.
|
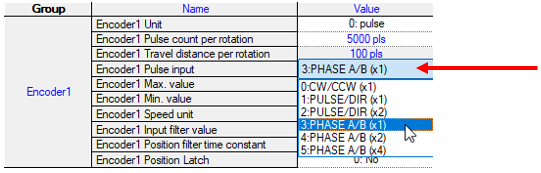
| 5 |
Configure the pulse input type of the encoder under Encoder1 Pulse input. This example shows 3: Phase A/B (x1) type encoder. Note: See Encoder Input Pulse Options for more information on pulse input types.
|
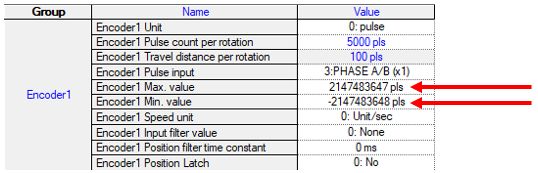
| 6 |
Enter the maximum and minimum encoder position values under Encoder1 Max. value and Encoder1 Min. value. This value will be in the type of unit configured for the encoder.
|
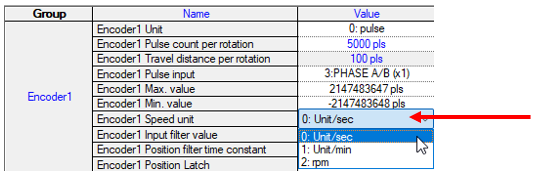
| 7 |
Select the speed unit type of the encoder under Encoder1 Speed unit. This example shows Units/sec for units per second and correlates to pulses per second.
|
| 8 |
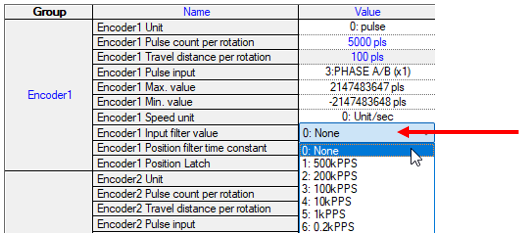
Configure an input filter under Encoder1 Input filter value if one is needed. This example shows that no input filter is needed. Note: This value limits the frequency of pulses on the encoder to the selected value.
|
| 9 |
Enter a position filter time constant under Encoder1 Position filter time constant. This example shows 0 ms. Note: This value is used to set a time constant of the input filter to calculate the encoder’s average position.
|
| 10 |
Enable or disable the position latch option for the encoder under Encoder1 Position Latch. 0: No to disable and 1: Use to enable. Note: Encoder 1 uses %IX0.0.0 input for position latch. Encoder 2 uses %IX0.0.1 input for position latch.
|

LM005-2