XGB EtherCAT Reset Axis Error with XPM_RST
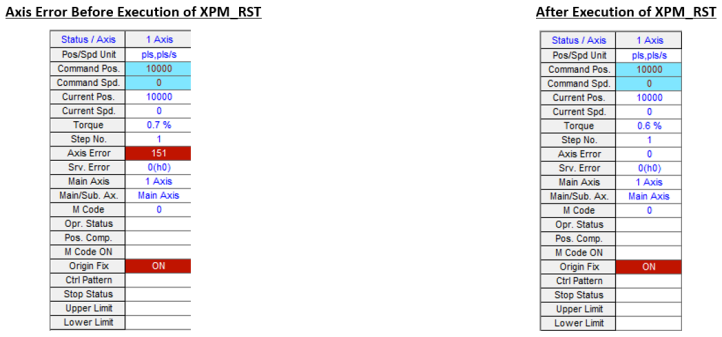
XPM_RST is used to reset an axis error. Once an error reset is executed, it erases error information from the selected axis. Common errors are error shared across all axes.
-
XPM_SRST is used to reset a servo drive error.
-
XPM_ECON must be executed before XPM_RST will reset an axis error.
-
Axis error information can be read with XPM_CRD function block.
-
The example code is located in Scan program LP629_XPP_RST_Example in OnlineHelp_ECAT_Example.
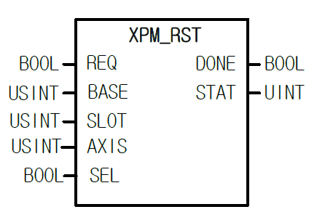
| Element Name | Element Type | Description |
|---|---|---|
| REQ | Input | Edge detected request to execute the function block. |
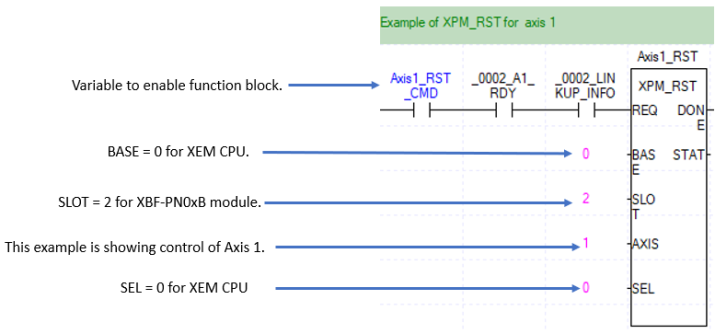
| BASE | Input | Base number of the motion controller. Equal to 0 for built-in position control. |
| SLOT | Input | Slot number of the motion controller. Set to the slot number of the XBF-PN04B or XBF-PN08B module. |
| AXIS | Input | Axis number to control. XBF-PN04B:1~4, XBF-PN08B:1~8 |
| SEL | Input | Select axis error or common error. Set to ‘0’ to reset Axis error. Set to ‘1’ to reset common error. |
| DONE | Output | Status that the function block is done |
| STAT | Output | Error status of the function block. |
XG-PM Monitoring of XPM_RST
LP629