XGB EtherCAT Indirect Start with XPM_IST
Indirect start functionality is done using the XPM_IST function block. XPM_IST allows the CPU to control the axis using the position data table. The axis being controlled must already be configured using the XG-PM software before using XPM_IST.
-
XPM_ECON and XPM_SVON must be executed before executing XPM_DST.
-
The Axis must be homed before performing any absolute moves.
-
These examples can be executed from Scan Program LP628_XPM_IST_Example in OnlineHelp_ECAT_Example.
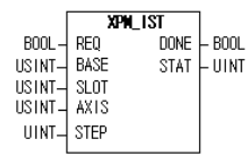
| Element Name | Element Type | Description |
|---|---|---|
| REQ | Input | Edge detected request to execute the function block |
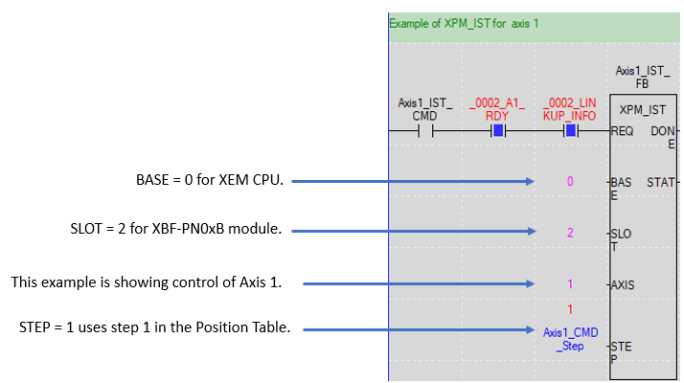
| BASE | Input | Base number of the motion controller. Set to 0. |
| SLOT | Input | Slot number of the motion controller. Set to the slot number of the XBF-PN04B or XBF-PN08B module. |
| AXIS | Input | Axis number to control. XBF-PN04B:1~4, XBF-PN08B:1~8 |
| STEP | Input | Step to execute in the position table. Must be a value between 0 – 400.If value is set to 0, then the current step is executed. This can be a constant or variable. |
| DONE | Output | Status that function block is done. |
| STAT | Output | Current status of the function block. Non-zero numbers will be an error or warning. |
The Position table is setup in the XG-PM software.
| Step | Action |
|---|---|
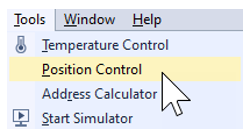
| 1 |
Open the XG5000 project for the application. Go to Tools menu è Position Control to open XG-PM software.
|
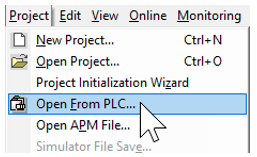
| 2 |
Open the XG-PM project or Connect to PLC and select Project è Open from PLC.
|
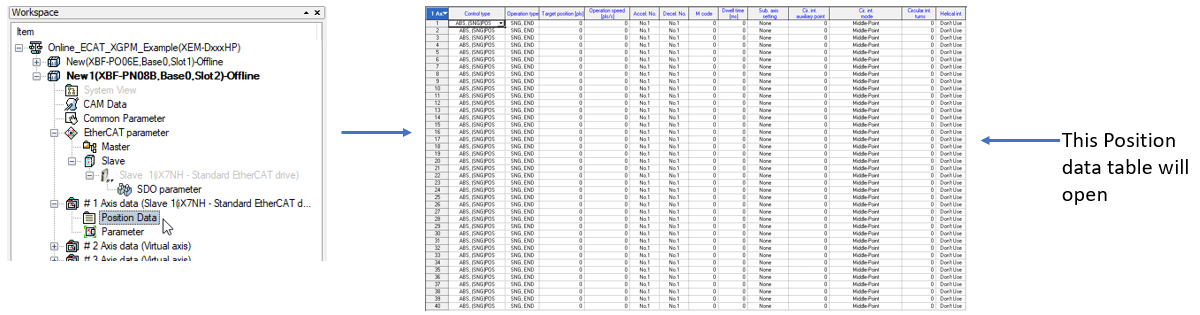
| 3 |
Open the Position data table in the Workspace for the axis that is being configured. This example shows Axis #1.
|
| 4 |
For the following examples, we will configure the Position data table with these entries:
|

Absolute Positioning will move an axis to a position relative to home position.
-
A positive Target position value will move in positive direction.
-
A negative Target position value will move in negative direction.

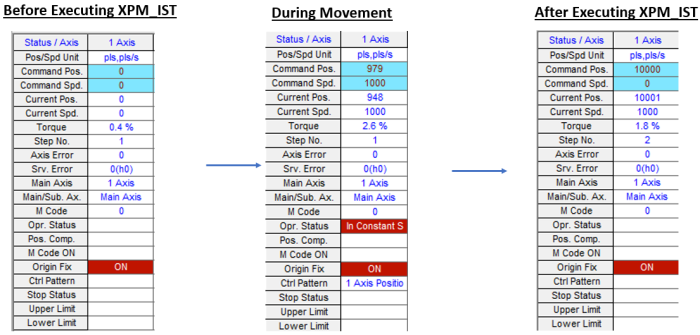
Axis 1 is configured for pulses. Commanding 10,000 pulse move.
Note: Homing needs to be completed with the XPM_ORG function block prior to executing XPM_IST in Absolute Positioning mode.
Executing XPM_IST in Absolute Positioning and Monitor in XG-PM
Absolute Positioning will move an axis to a position relative to home position. Axis must be homed before performing an absolute positioning move.
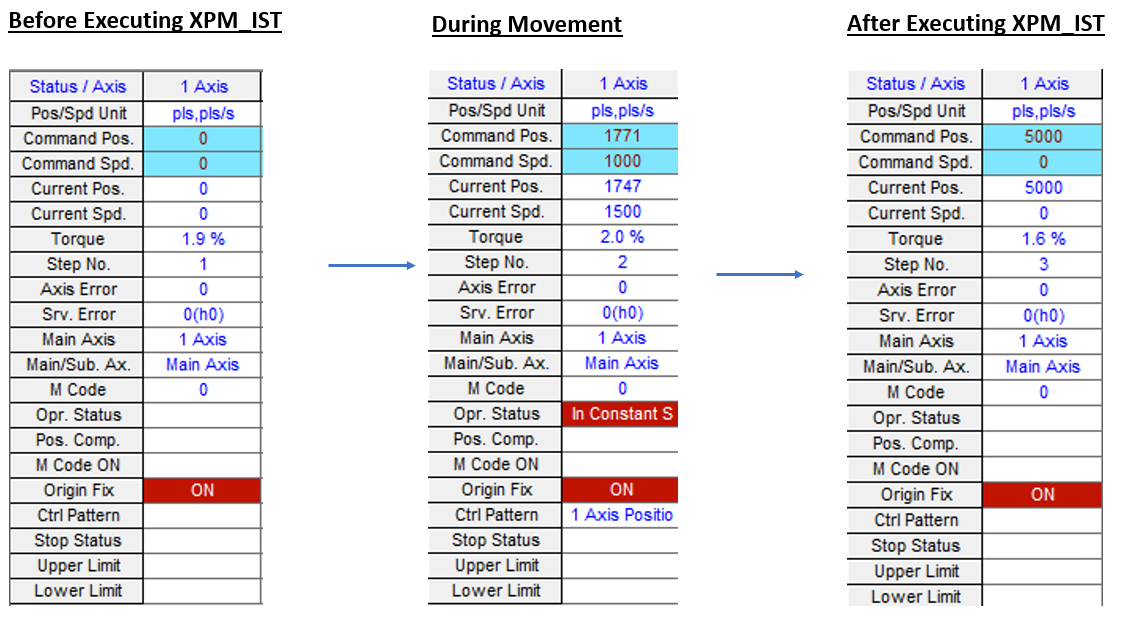
Relative Positioning will move an axis to a position relative to current position.
-
A positive Target position value will move in positive direction.
-
A Negative Target position value will move in negative direction.
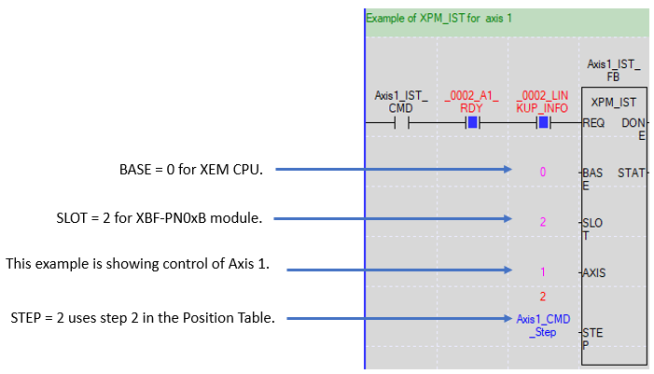

Axis 1 is configured for pulses, commanding 5,000 pulse relative move.
Executing XPM_IST in Relative Positioning and Monitor in XG-PM
Speed Control allows the CPU to set a run speed for the axis. Axis will run at this speed until another command is executed or stopped.
-
Target Position being a positive value will turn axis in positive direction.
-
Target Position being a negative value will turn axis in negative direction.
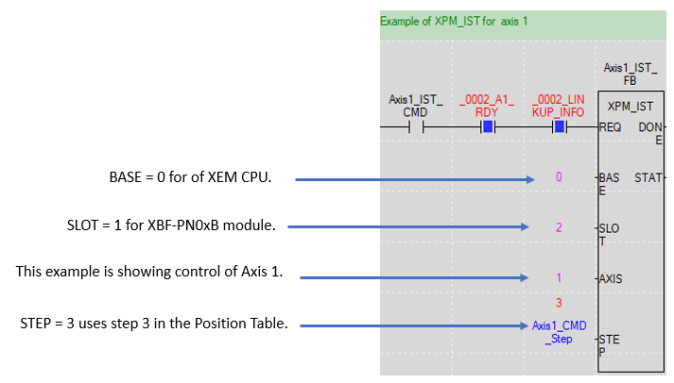

Speed of movement set to 1000 pulses/sec.
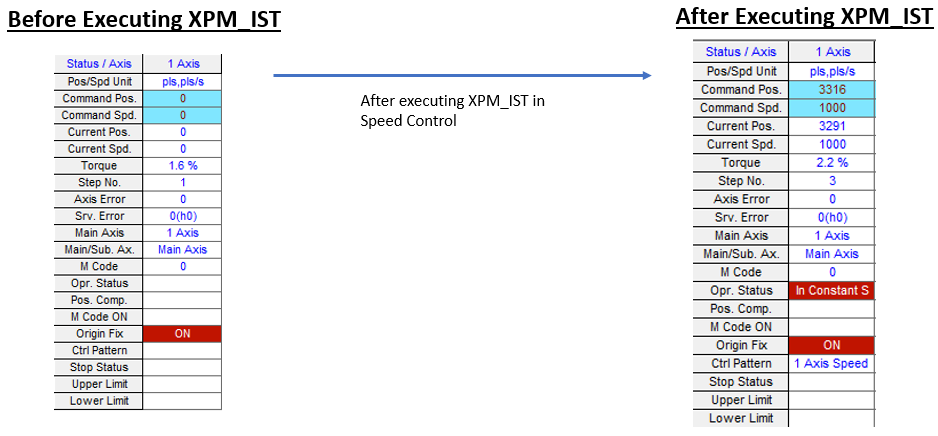
Before and After Executing XPM_IST in Speed Control
In this example, we want to run the axis in positive direction at 1000 pulses/sec.
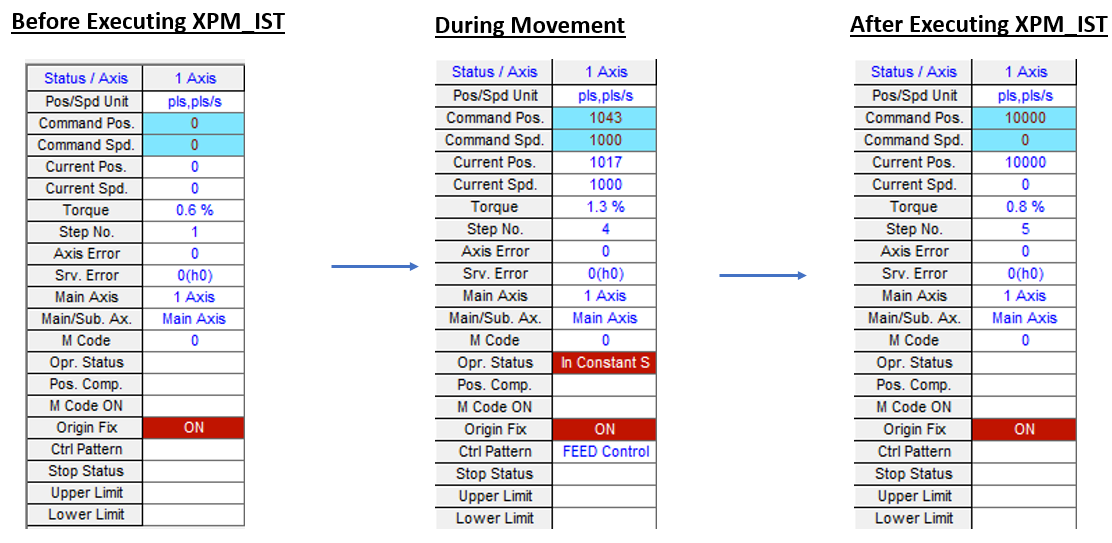
FEED Control will reset the current position to 0 when executed. It will then move the number of Pulses in the Target position value of the Position table step. If it is run again, then the current Position will be set to 0 again before moving.
-
Positive Target Position value will move in positive direction.
-
Negative Target Position value will move in negative direction.
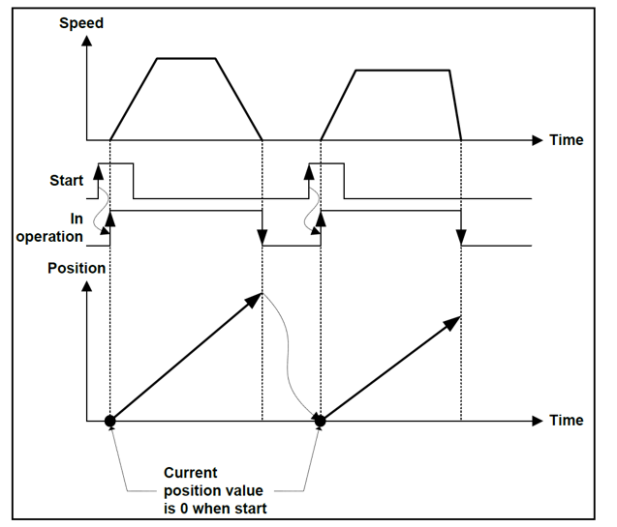
XPM_IST with FEED Control Example
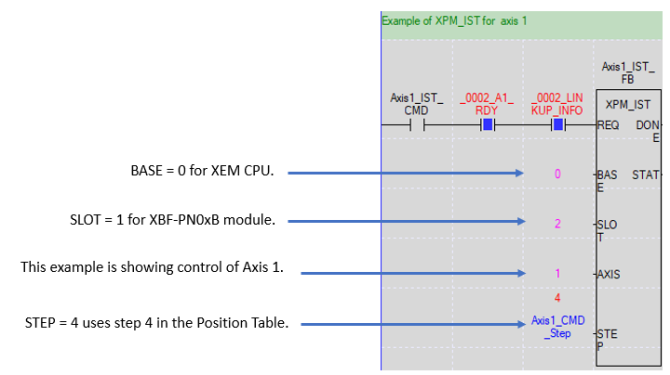

Target Position is set to 10000 to move in positive direction 10,000 pulses.
Executing XPM_IST in Feed Control and Monitor in XG-PM
LP628