XGB EtherCAT Homing Function Blocks
The Homing method will need to be configured on the EtherCAT servo drive or the SDO parameter file in the XG-PM project. EtherCAT homing has a standard meaning for each homing method number.
-
The homing method numbers 1 thru 37 are standard DS402 defined homing methods.
-
Some drives do not support all 37 methods.
-
Homing methods with a negative value are custom and specific to the manufacturer.
-
Refer to the servo drive manual for more information on homing methods.
-
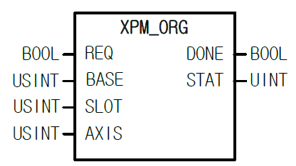
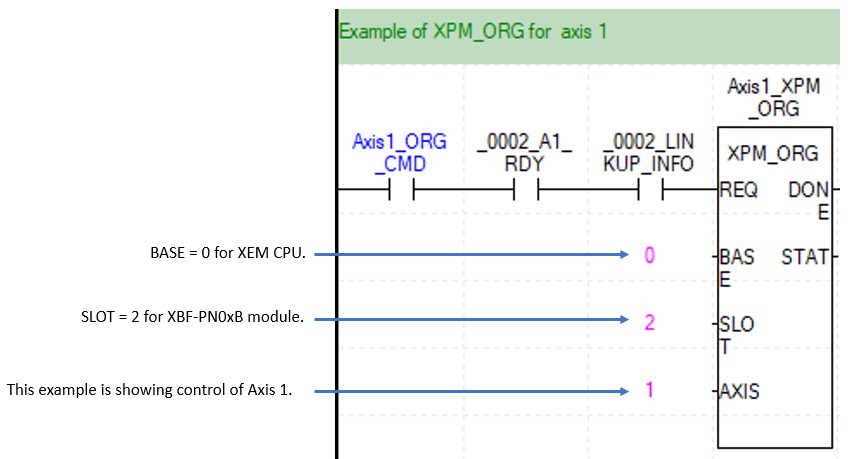
The XPM_ORG function block is used to perform the homing method configured for the drive.
-
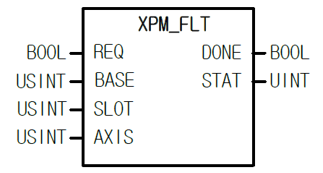
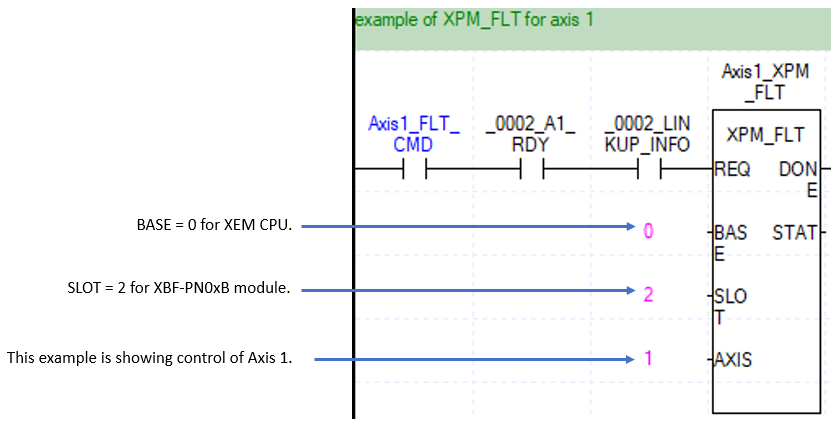
The XPM_FLT function block is used to set the current position as the new home position.
-
XPM_ECON and XPM_SVON must be executed prior to executing a home command.
The examples in this topic can be executed from Scan Program LP626_Homing_Example in OnlineHelp_ECAT_Example.
| Element Name | Element Type | Description |
|---|---|---|
| REQ | Input | Edge detected request to execute the function block. |
| BASE | Input | Base number of the motion controller. Set to 0. |
| SLOT | Input | Slot number of the motion controller. Set to the slot number of the XBF-PN04B or XBF-PN08B module. |
| AXIS | Input | Axis number to control. XBF-PN04B:1~4, XBF-PN08B:1~8 |
| DONE | Output | Status that function block is done. |
| STAT | Output | Current status of the function block. Non-zero numbers will be an error or warning. |
| Element Name | Element Type | Description |
|---|---|---|
| REQ | Input | Edge detected request to execute the function block. |
| BASE | Input | Base number of the motion controller. Set to 0. |
| SLOT | Input | Slot number of the motion controller. Set to the slot number of the XBF-PN04B or XBF-PN08B module. |
| AXIS | Input | Axis number to control. XBF-PN04B:1~4, XBF-PN08B:1~8 |
| DONE | Output | Status that function block is done. |
| STAT | Output | Current status of the function block. Non-zero numbers will be an error or warning. |
| Homing Method Number | Description |
|---|---|
| 1 | The drive returns to the home position by the negative limit switch (NOT) and the Index (Z) pulse while driving in the negative direction. |
| 2 | The drive returns to the home position by the positive limit switch (POT) and the Index (Z) pulse while driving in the positive direction. |
| 7,8,9,10 | The drive returns to the home position by the home switch (HOME) and the Index (Z) pulse while driving in the positive direction. When the positive limit switch (POT) is input during homing, the drive switches its driving direction. |
| 11,12,13,14 | The drive returns to the home position by the home switch (HOME) and the Index (Z) pulse while driving in the negative direction. When the negative limit switch (NOT) is input during homing, the drive switches its driving direction. |
| 24 | The drive returns to the home position by the home switch (HOME) while driving in the positive direction. When the positive limit switch (POT) is input during homing, the drive switches its driving direction. |
| 28 | The drive returns to the home position by the home switch (HOME) while driving in the negative direction. When the negative limit switch (NOT) is input during homing, the drive switches its driving direction. |
| 33 | The drive returns to the home position by the Index (Z) pulse while driving in the negative direction. |
| 34 | The drive returns to the home position by the Index (Z) pulse while driving in the positive direction. |
| 35 | Sets the current position as the home position. |
| -1 | The drive returns to the home position by the negative stopper and the Index (Z) pulse while driving in the negative direction. |
| -2 | The drive returns to the home position by the positive stopper and the Index (Z) pulse while driving in the positive direction. |
| -3 | The drive returns to the home position only by the negative stopper while driving in the negative direction. |
| -4 | The drive returns to the home position only by the positive stopper while driving in the positive direction. |
| -5 | The drive returns to the home position only with the home switch (HOME) while driving in the negative direction. |
| -6 | The drive returns to the home position only with the home switch (HOME) while driving in the positive direction. |
| Step | Action |
|---|---|
| 1 | Open XG-PM project. |
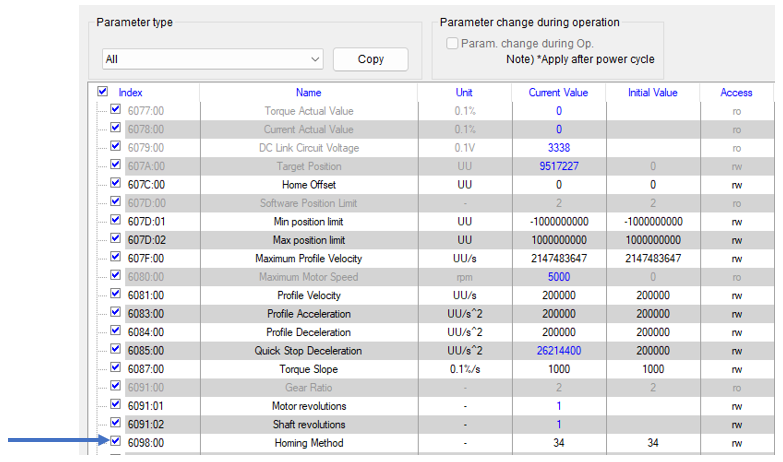
| 2 |
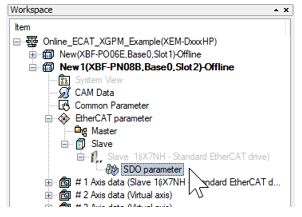
In the Workspace window under the XBF-PN0xB module, navigate to EtherCAT parameter è Slave è Slave # of drive. This example shows Slave 1 as an iX7NH servo drive.
|
| 3 |
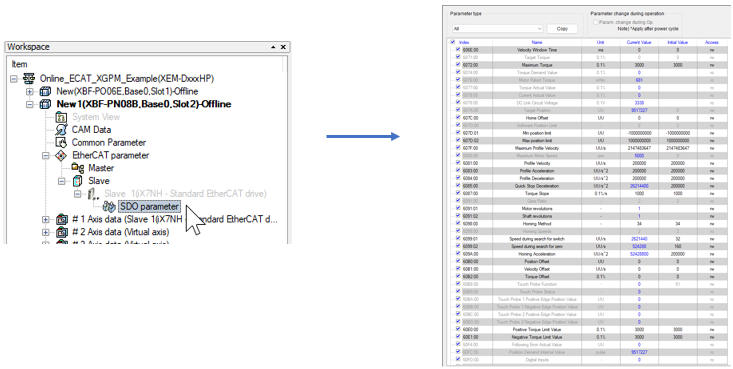
Double-click the SDO parameter file to open the Parameter window.
|
| 4 |
Scroll down to find Homing Method. Modify this value to match the method required for your application.
|
| 5 | If no other homing parameters need to be changed, Save the project. |
| 6 | Connect to the XEM CPU and write the project. |
LP626