EtherCAT XPM_GEARIP for Speed Synchronization while Designating Synchronous Position
The axes being controlled must already be configured using the XG-PM software before using the synchronization function blocks.
The examples in this topic can be found in OnlineHelp_ECAT_Example.
-
XPM_GEARIP is used to control an axis by referring to the main axis movement at the Ratio (Synchronization rate) input value.
-
If the synchronization ratio is positive, the minor axis rotates in the direction of the main axis.
-
If the synchronization ratio is negative, the minor axis rotates in the opposite direction of the main axis.
-
If Ratio > 1, then minor axis will move faster.
-
If Ratio < 1, then major axis will move faster.
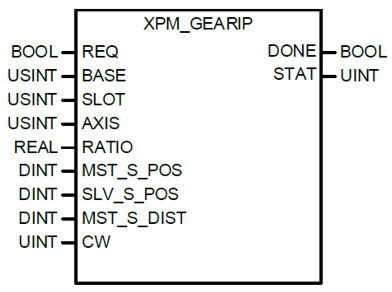
| Element Name | Element Type | Description |
|---|---|---|
| REQ | Input | Edge detected request to execute the function block. |
| BASE | Input | Base number of the motion controller. Equal to 0 for XEM CPU. |
| SLOT | Input | Slot number of the motion controller. Equal to slot number of XBF-PN04B or XBF-PN08B module. |
| AXIS | Input |
Axis number to control.
This can be a constant or variable. This will be the minor axis. |
| RATIO | Input | Synchronization rate. |
| MST_S_POS | Input | Set a position of the main axis to be synchronized. Value can be between -2,147,483,648 and 2,147,483,647. |
| SLV_S_POS | Input | Set a position for the minor axis to be synchronized. Value can be between -2,147,483,648 and 2,147,483,647. |
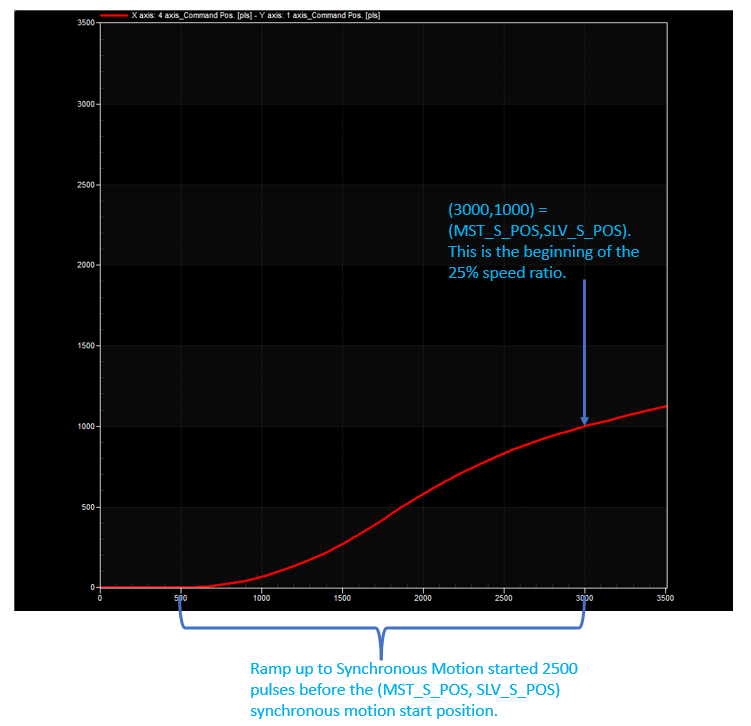
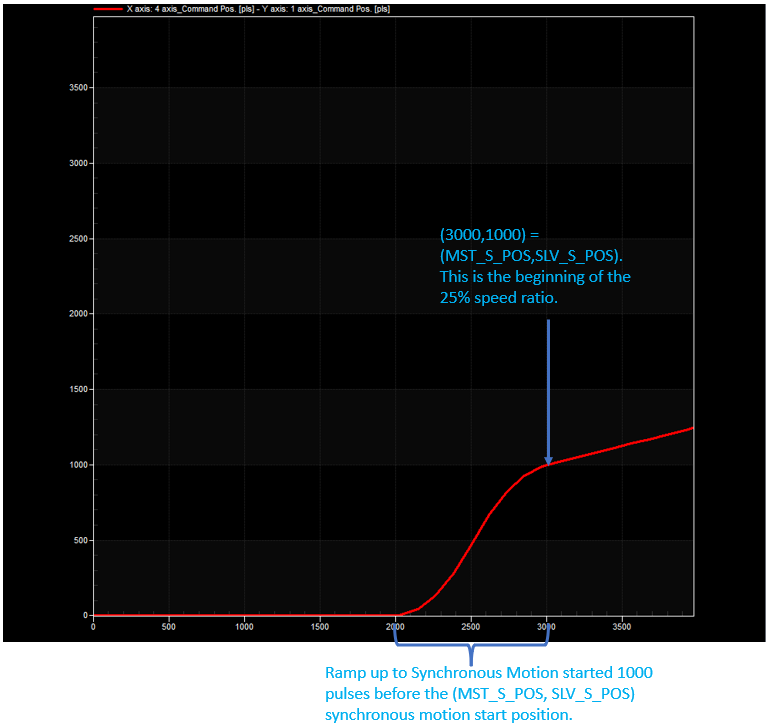
| MST_S_DIST | Input | Distance from the synchronous start position of (MST_S_POS, SLV_S_POS) to ramp up to synchronous motion. |
| CW | Input |
Main Axis.
|
| DONE | Output | Status that function block is done. |
| STAT | Output | Current status of the function block. Non-zero numbers will be an error or warning. |
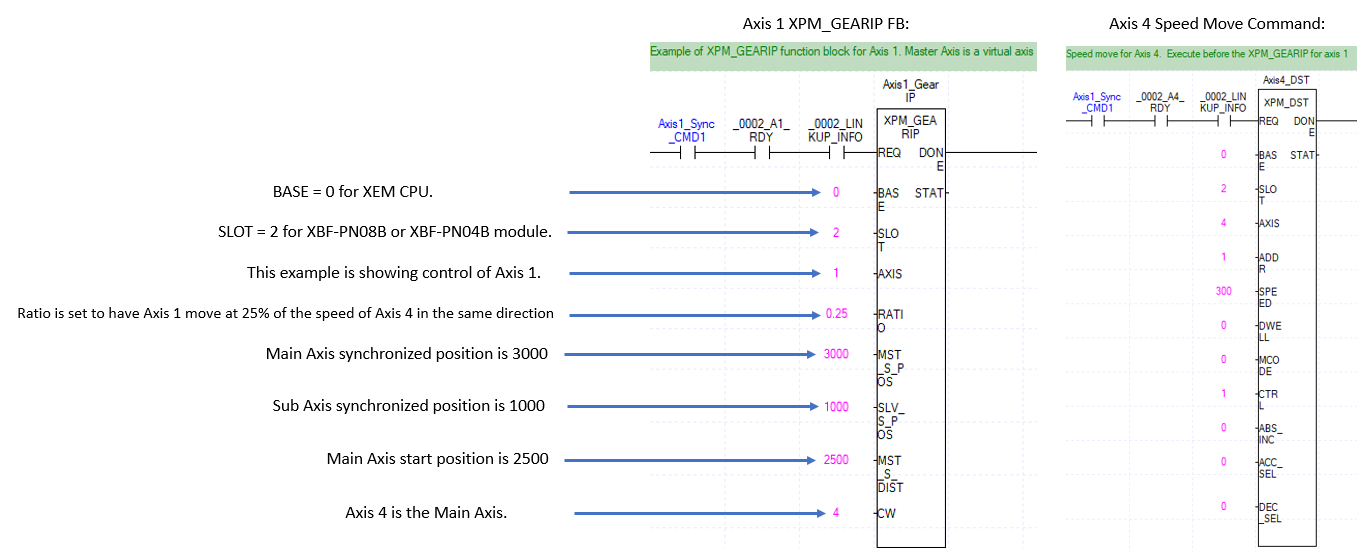
This example is Scan Program LP618_XPM_GEARIP_Example in OnlineHelp_ECAT_Example.
-
In this example Axis 4 is the master axis and Axis 1 is the sub-axis. Axis 4 is a virtual axis.
-
When the Axis1_Sync_CMD1 variable is true, Axis 4 will do a speed control move to 300 pulses/sec and Axis 1 will execute an XPM_GEARIP function block.
-
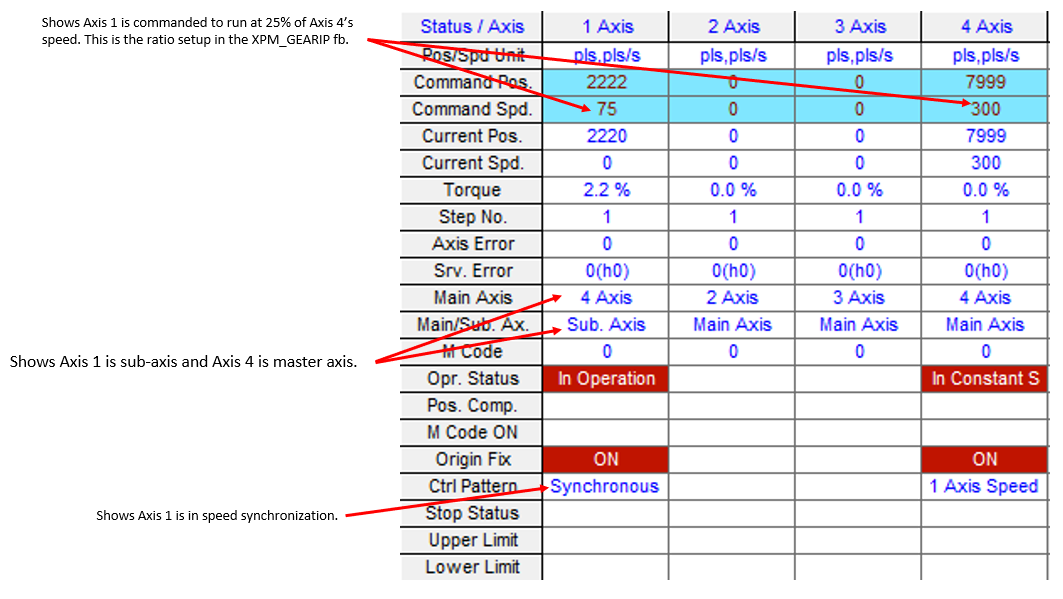
Axis 1’s XPM_GEARIP is setup to speed synchronize with Axis 4 at 25% of Axis 4’s speed.
-
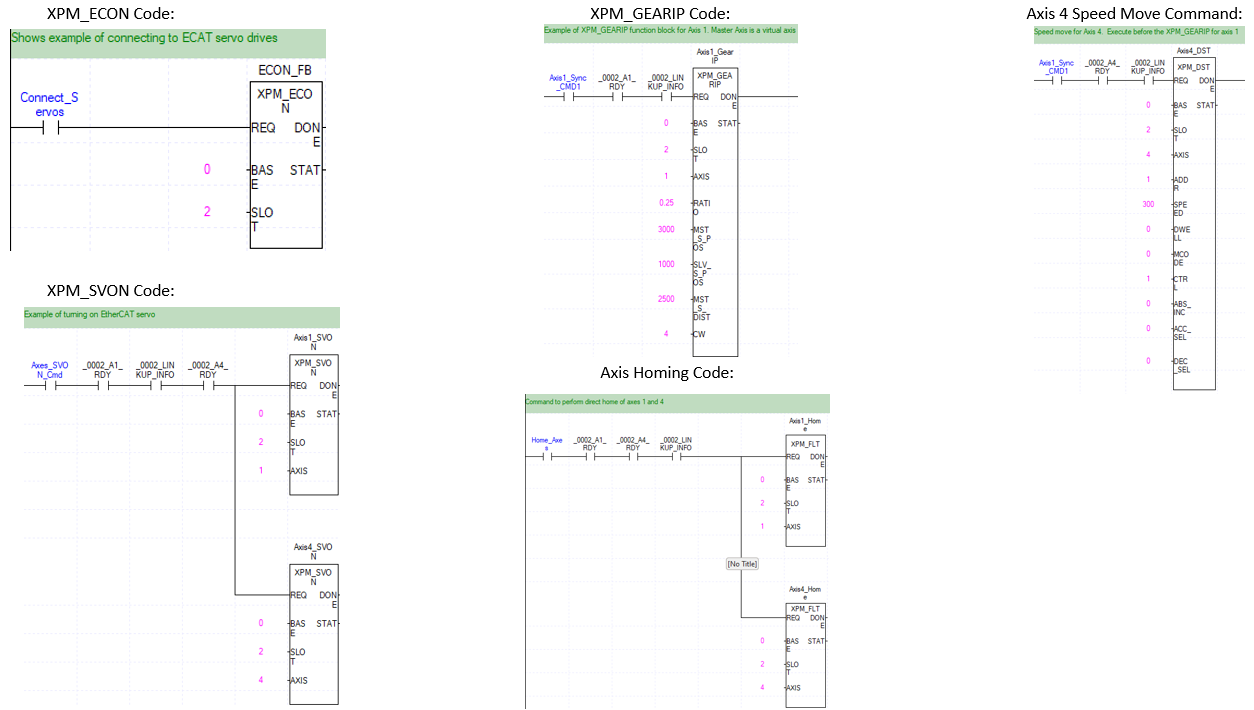
Execute XPM_ECON to connect EtherCAT network.
-
Execute XPM_SVON function blocks to power on axes.
-
Execute Home_Axes command before Axis1_Sync_CMD1.
XPM_GEARIP LD Code
XG-PM Monitoring for XPM_SSSD example
XG-PM Trend Showing MST_S_DIST of 2500
XG-PM Trend Showing MST_S_DIST of 1000
LP618