EtherCAT Phase Correction Control with XPM_PHASING
The XPM_PHASING function block is used to apply a position adjustment to a sub-axis during synchronized movement.
-
The sub-axis’ position will be adjusted by the amount entered in the PHASE_VAL value in reference to the master position at the time the function block is executed.
-
The phase correction is applied with the velocity, acceleration and deceleration values entered in the function block.
-
The sub-axis must be in synchronized motion to use XPM_PHASING.
-
This function block is useful for print mark registration and web tension applications.
The examples in this topic can be found in OnlineHelp_ECAT_Example.
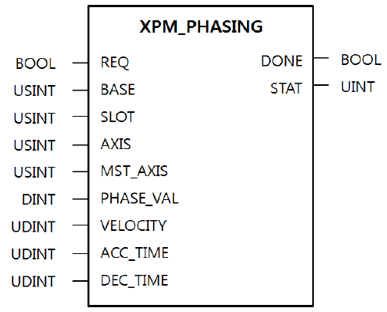
| Element Name | Element Type | Desscription |
|---|---|---|
| REQ | Input | Edge detected request to execute the function block. |
| BASE | Input | Base number of the motion controller. Set 0 to the Base number. |
| SLOT | Input | Slot number of the motion controller. Set to the slot number of the XBF-PN04B or XBF-PN08B module. |
| AXIS | Input |
Axis to apply the phase correction.
|
| MST_AXIS | Input |
Set the main axis of the phase correction.
|
| PHASE_VAL | Input | Phase correction value. If using engineering units, make sure values are scaled correctly. |
| VELOCITY | Input | Speed used to apply phase correction movement. If using engineering unit, make sure values are scaled correctly. |
| ACC_TIME | Input | Acceleration time of the phase correction movement. (0 to 2,147,483,647 ms) |
| DEC_TIME | Input | Deceleration time of the phase correction movement. (0 to 2,147,483,647 ms) |
| DONE | Output | Status that function block is done. |
| STAT | Output | Current status of the function block. Non-zero numbers will be an error or warning. |
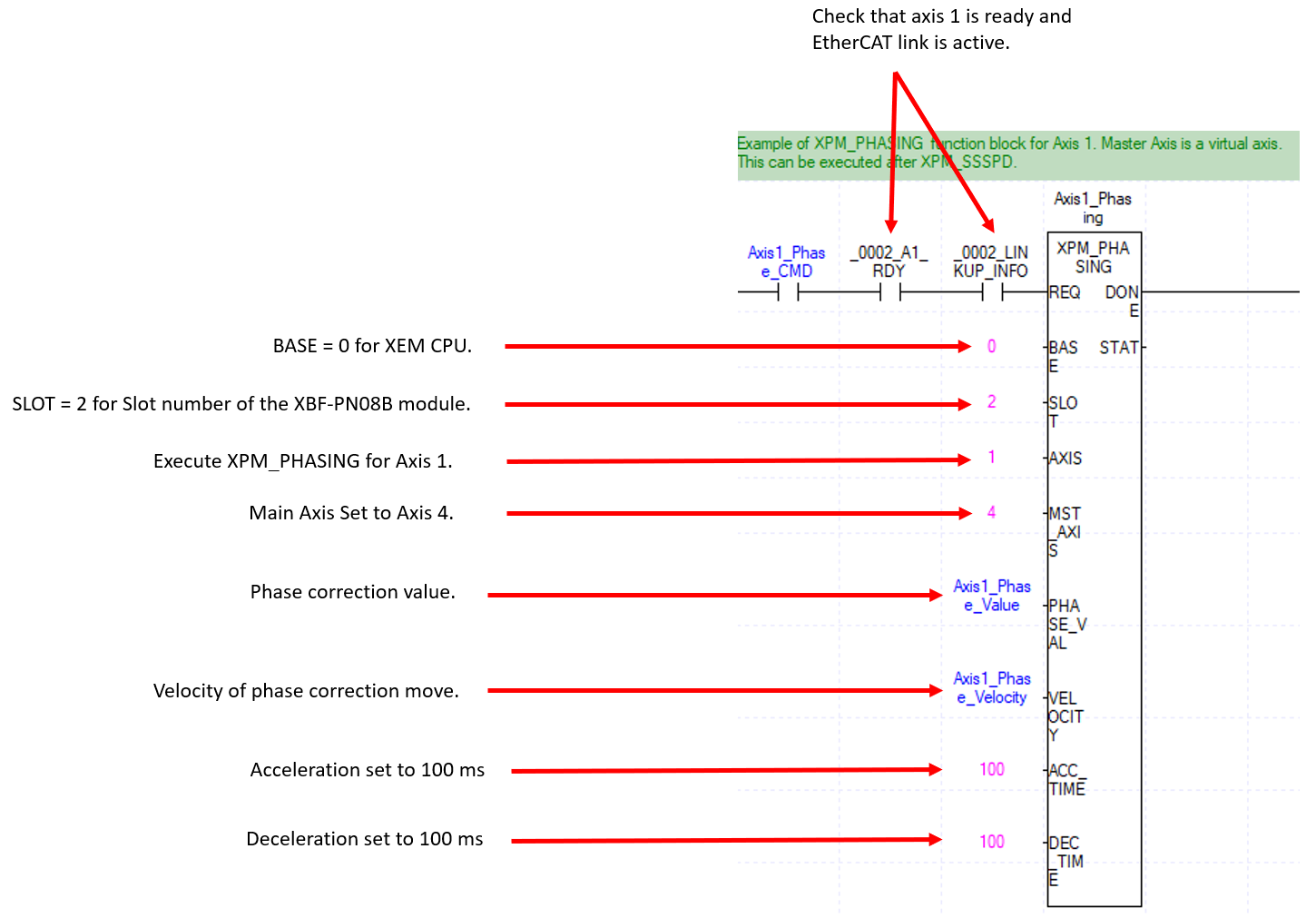
Scan Program LP616_XPM_PHASING_Example is used for the following examples.
-
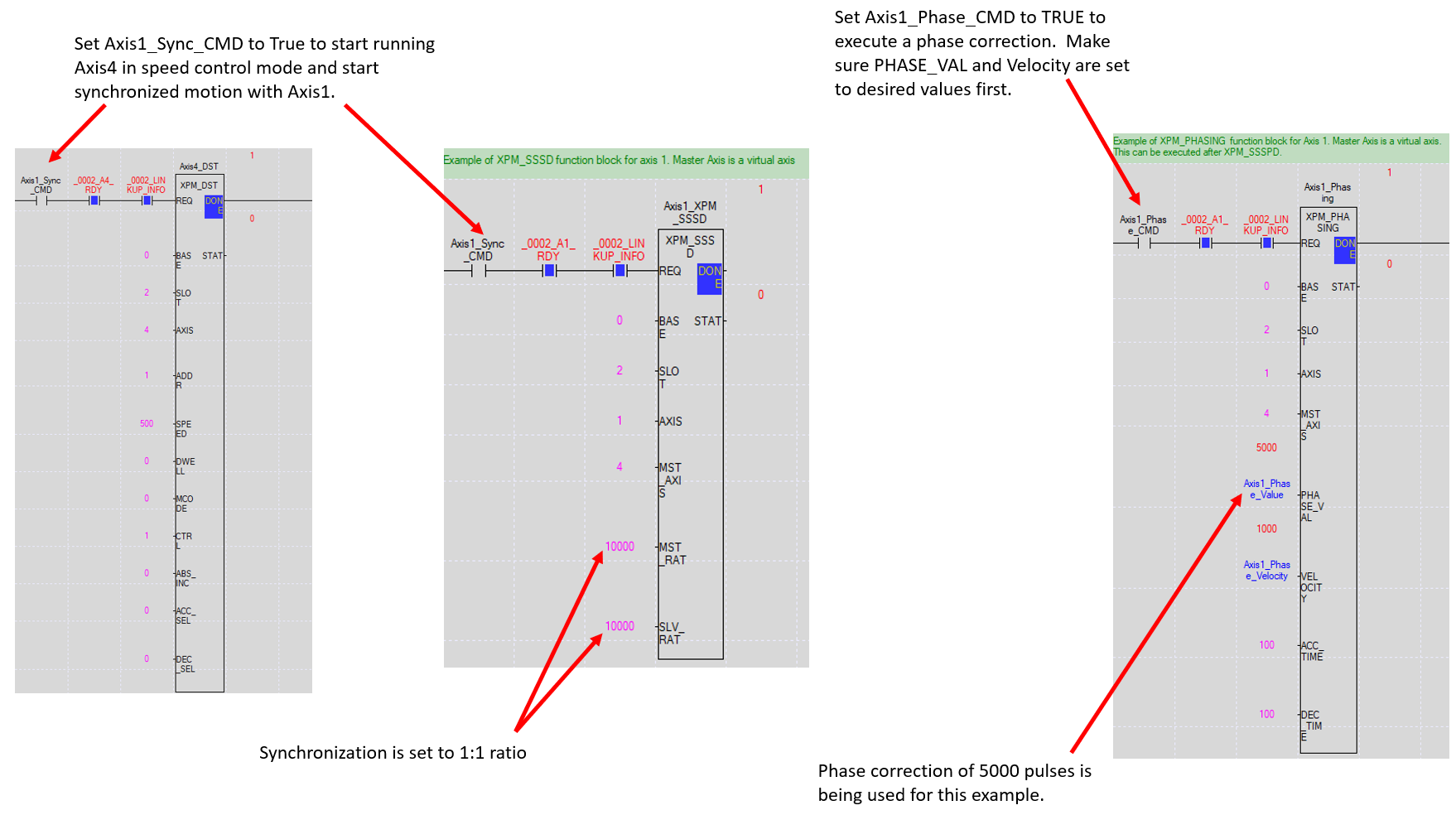
The XPM_SSSD function block is used to put Axis 1 into synchronized motion.
-
Axis 4 is a virtual Axis that is used as the main axis.
-
Axis 1 will have a phase correction to its position.
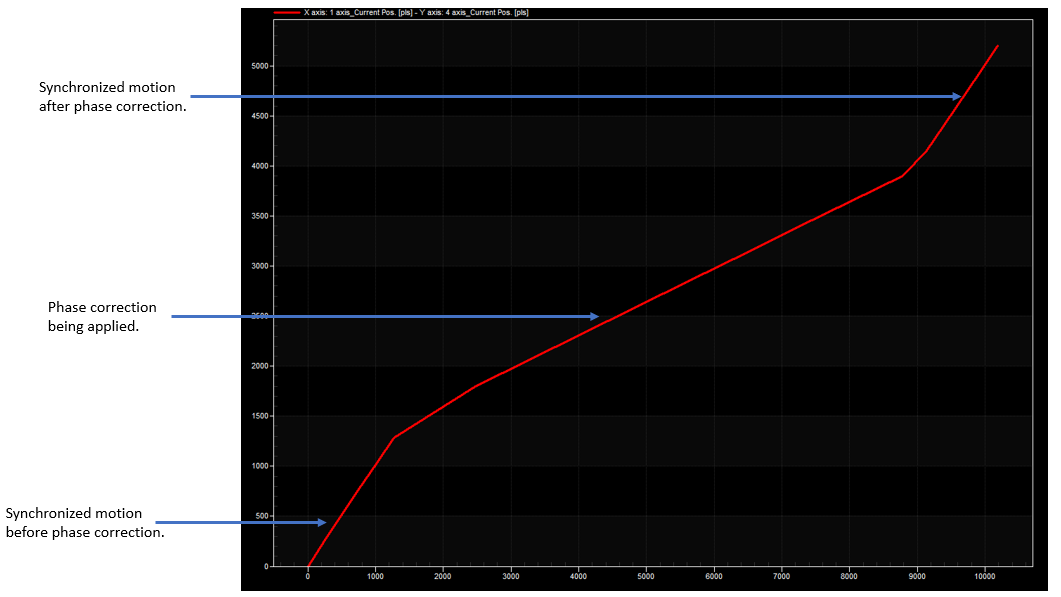
Monitoring XPM_PHASING Example
XPM_PHASING XY Trend
LP616