XPM_SSSD
XPM_SSSD is used to control the operating speed between two axes at the set ratio.
-
The synchronization is done with the Master Ratio and Sub-axis Ratio.
-
If master ratio value is larger, then the sub-axis will move slower than the master.
-
If sub-axis ratio value is larger, then the sub-axis will move faster than the master.
-
The sub-axis will move in the same direction as the master axis if the ratio is positive.
-
The sub-axis will move in the opposite direction of the master axis if the ratio is negative.
-
XPM_SSSD has a 32-bit integer ratio and can only be used with the XBF-PN08B and XBF-PN04B modules.
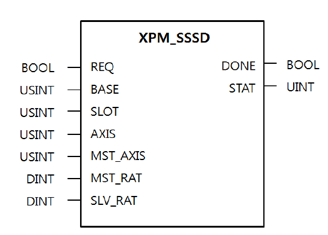
| Element Name | Element Type | Description |
|---|---|---|
| REQ | Input | Edge detected request to execute the function block. |
| BASE | Input | Base number of the motion controller. Equal to 0 for built-in position control. |
| SLOT | Input | Slot number of the motion controller. Equal to slot number of XBF-PN04B or XBF-PN08B module. |
| AXIS | Input |
Axis number to control.
This can be a constant or variable. |
| MST_AXIS | Input |
Master axis number.
|
| MST_RAT | Input | Master speed ratio value. Value can be between -2,147,483,648 ~ 2,147,483,647. |
| SLV_RAT | Input | Sub-axis speed ratio value can be between -2,147,483,648 ~ 2,147,483,647. |
| DONE | Output | Status that function block is done. |
| STAT | Output | Current status of the function block. Non-zero numbers will be an error or warning. |
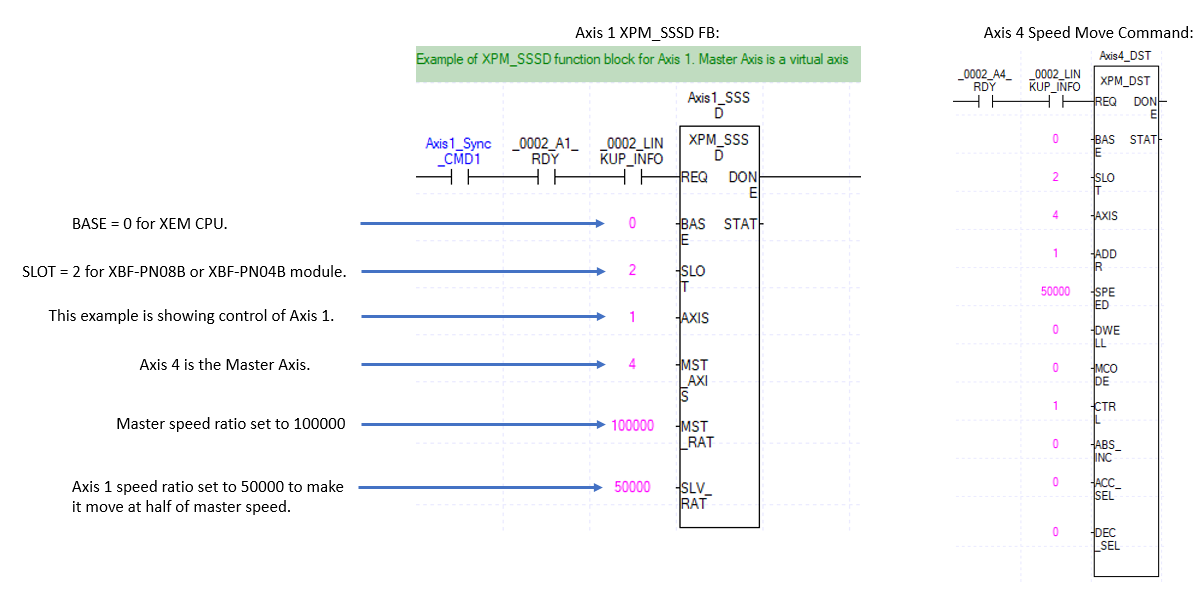
This example is Scan Program ‘LP611_XPM_SSSD_SSSPD_Example’ in OnlineHelp_ECAT_Example.
-
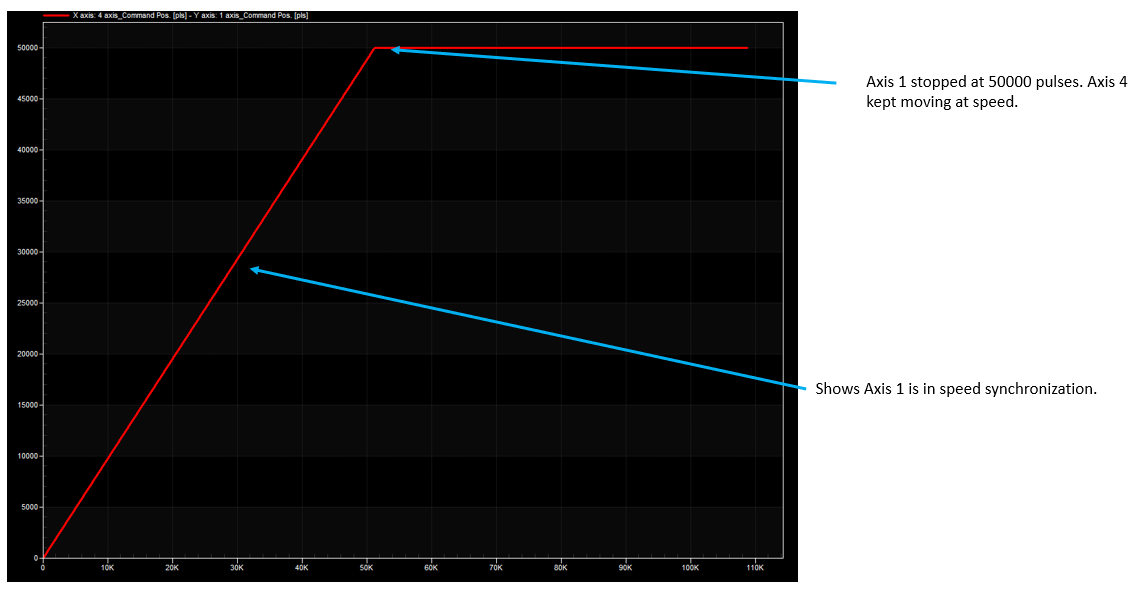
In this example Axis 4 is the master axis and Axis 1 is the sub-axis. Axis 4 is a virtual axis.
-
When the ‘Axis1_Sync_CMD1’ variable is true, Axis 4 will do a speed control move to 50000 pulses/sec and Axis1 will execute an XPM_SSSD function block.
-
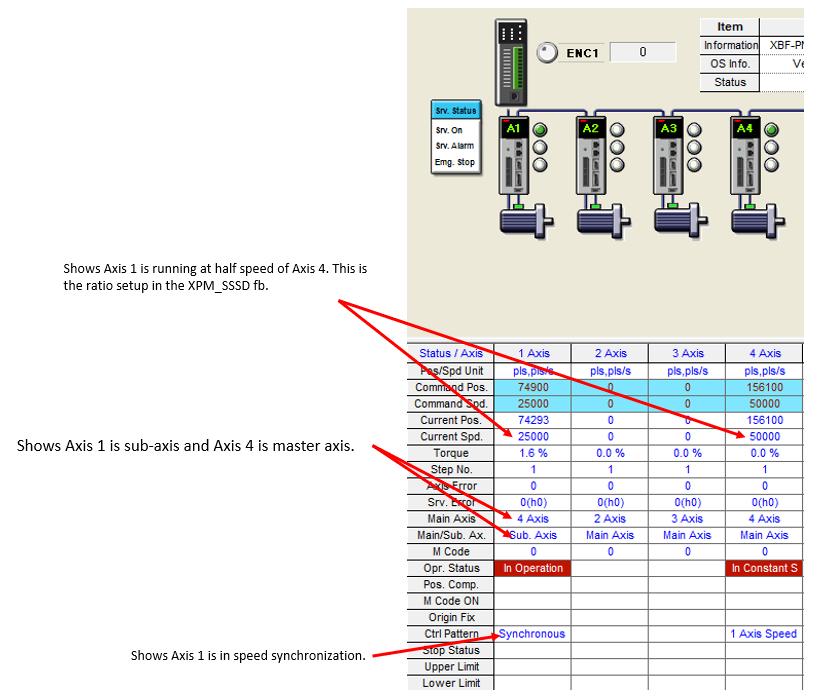
Axis 1’s XPM_SSSD is setup to speed synchronize with Axis 4 at half of Axis 4’s speed.
-
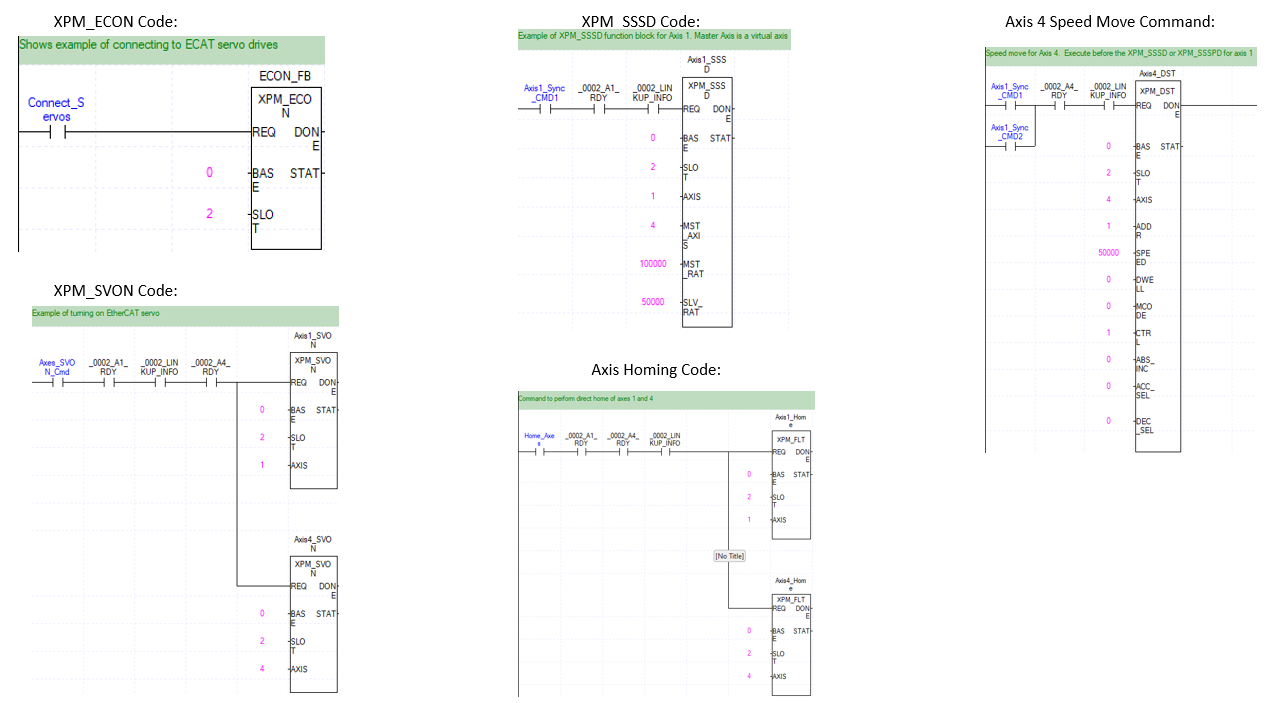
Execute XPM_ECON to connect EtherCAT network.
-
Execute XPM_SVON fbs to power on axes.
LP615-1