EtherCAT Servo Parameters with XPM_SVPRD and XPM_SVPWR
-
The XPM_SVPRD function block is used to read servo parameter information from an axis.
-
The XPM_SVPWR function block is used to write servo parameter information to an axis.
-
The XPM_SVSAVE function block is used to save servo parameters from an axis to the EEPROM of the servo driver.
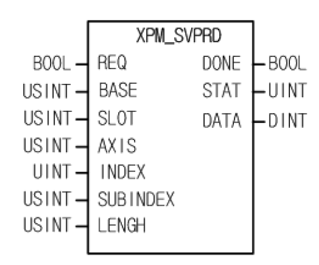
| Element Name | Element Type | Description |
|---|---|---|
| REQ | Input | Edge detected request to execute the function block |
| BASE | Input | Base number of the motion controller. Set 0 to the Base number. |
| SLOT | Input | Slot number of the motion controller. Set to the slot number of the XBF-PN04B or XBF-PN08B module. |
| AXIS | Input | Axis to read servo parameter information. |
| INDEX | Input | Servo Parameter index number. 0x1000 ~ 0x1FFF set value range for Communication Profile Area. 0x2000 ~ 0x5FFF set value range for Manufacturer specific profile area. 0x6000 ~ 0x9FFF set value range for Standardized device profile area. |
| SUBINDEX | Input | Servo Parameter sub-index number. 0x0 ~ 0xFF Set value range. |
| LENGTH | Input | Servo parameter object size. Set value 1~4 for Object Byte length. |
| DONE | Output | Status that function block is done. |
| STAT | Output | Current status of the function block. Non-zero numbers will be an error or warning. |
| DATA | Output | Servo error information. |
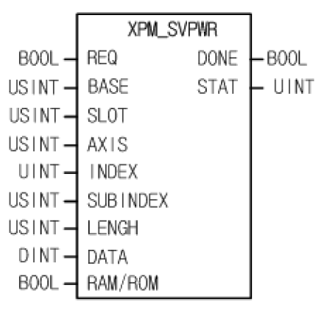
| Element Name | Element Type | Description |
|---|---|---|
| REQ | Input | Edge detected request to execute the function block |
| BASE | Input | Base number of the motion controller. Set 0 to the Base Number. |
| SLOT | Input | Slot number of the motion controller. Set to the slot number of the XBF-PN04B or XBF-PN08B module. |
| AXIS | Input | Axis to command with function block |
| INDEX | Input | Servo parameter index number. 0x2000 ~ 0x5FFF set value for Manufacturer specific profile area. 0x6000 ~ 0x9FFF set value for Standardized device profile area. |
| SUBINDEX | Input | Servo parameter sub-index number. 0x0 ~ 0xFF set value for Servo parameter Object subindex. |
| LENGTH | Input | Servo parameter Object Byte Length with value between 1 ~ 4. |
| DATA | Input | Servo parameter value. |
| RAM/ROM | Input |
Where to save parameter.
|
| DONE | Output | Status that function block is done. |
| STAT | Output | Current status of the function block. Non-zero numbers will be an error or warning. |
The following examples can be found in OnlineHelp_ECAT_Example.
-
XPM_ECON needs to be executed first so EtherCAT servo drives are connected to receive commands.
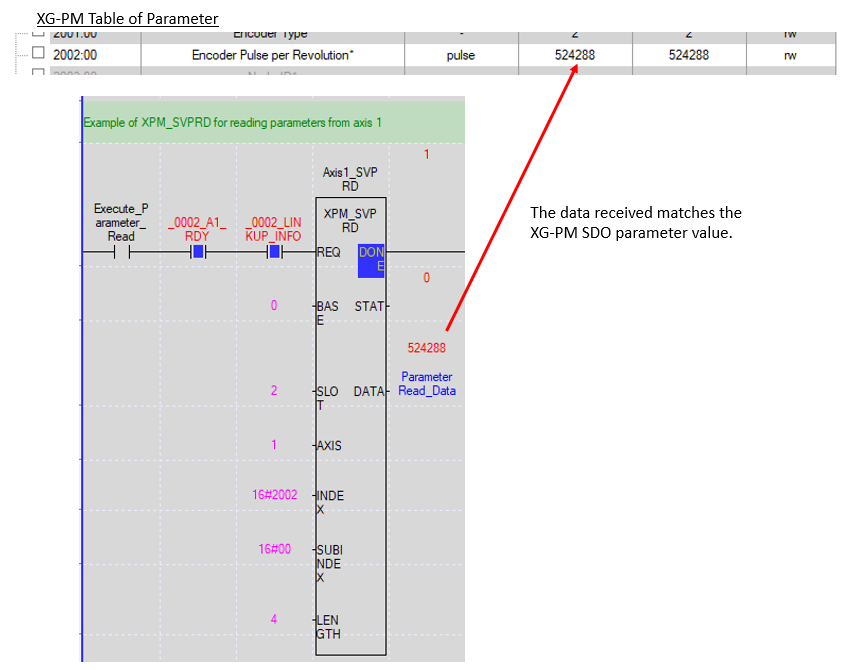
This example shows using the XPM_SVPRD function block to read the Encoder Pulse per Revolution parameter from Axis 1.
The Parameter index and sub-index in the SDO parameter file have hex values.

XPM_SVPRD Example Results
This example shows using the XPM_SVPWR function block writing to Home Offset parameter of Axis 1.
The Parameter index and sub-index in the SDO parameter file have hex values.
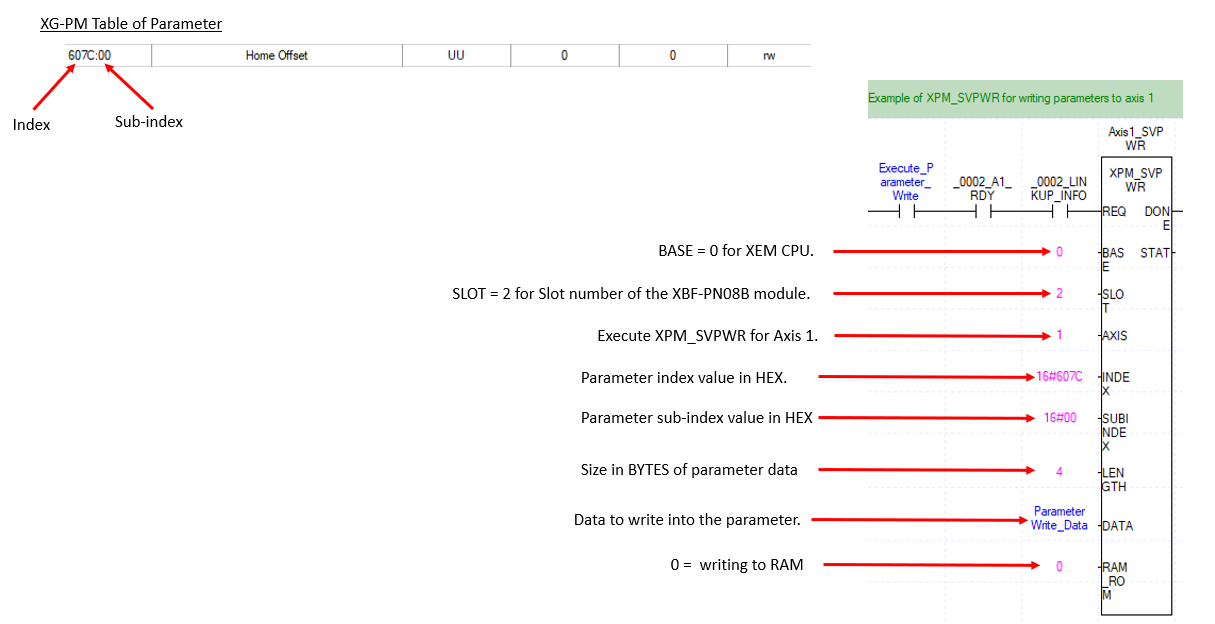
XPM_SVPWR Example Results

LP613