EtherCAT Torque Control using XPM_TRQ
The XPM_TRQ function block is used to control an axis in torque control mode.
-
The allowable range of torque value is limited to the maximum torque setting.
-
When torque value is positive, the positioning will go in forward direction.
-
When torque value is negative, the positioning will go in negative direction.
-
Torque Control can not be executed in these cases:
-
Axis is not in standstill or not already in torque control state.
-
Axis servo drive is in servo-off state.
-
Axis servo drive doesn’t support torque control mode.
-
XPM_TRQ Details
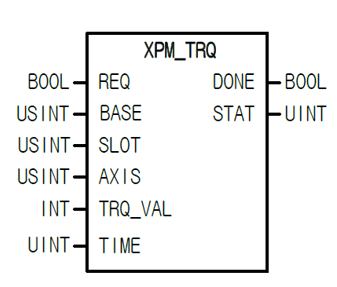
| Element Name | Element Type | Description |
|---|---|---|
| REQ | Input | Edge detected request to execute the function block. |
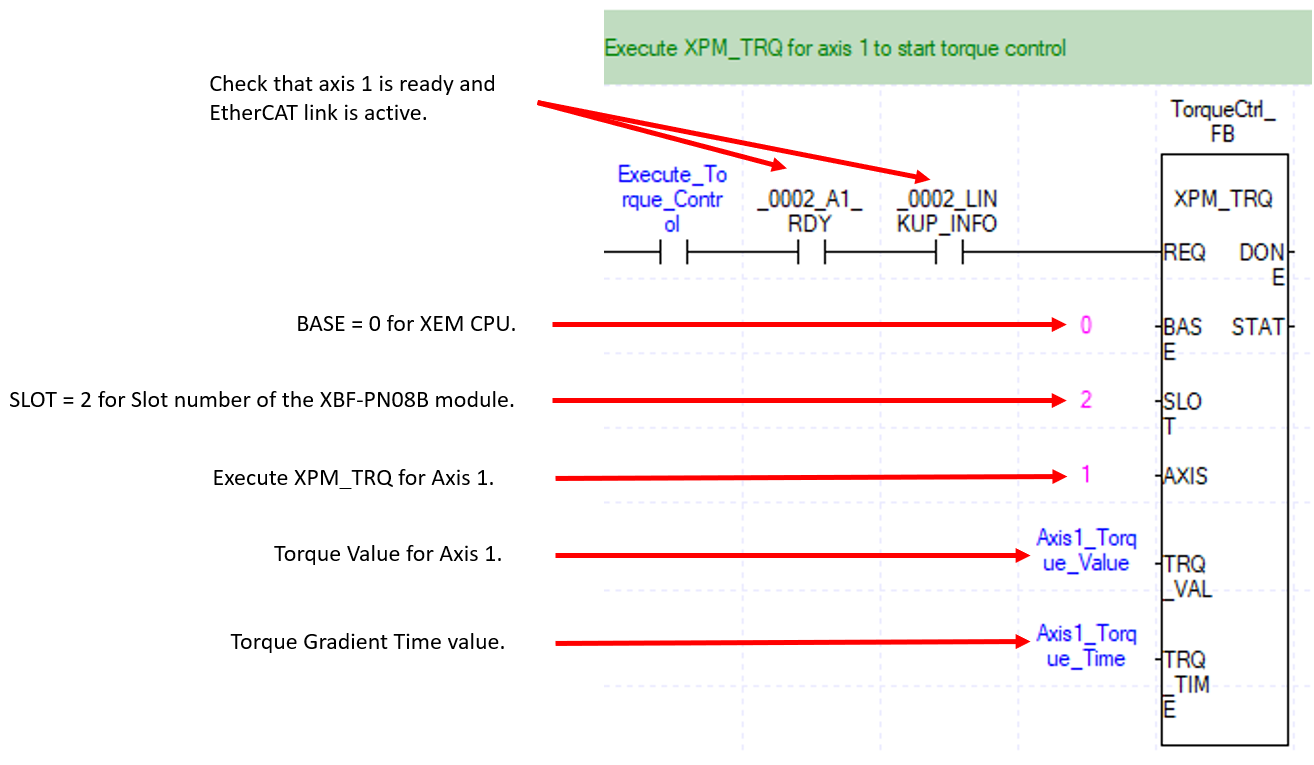
| BASE | Input | Base number of the motion controller. Set 0 to the Base number. |
| SLOT | Input | Slot number of the motion controller. Set to the slot number of the XBF-PN04B or XBF-PN08B module. |
| Axis | Input | Axis number to control. XBF-PN04B: 1-4, XBF-PN08B: 1-8. |
| TRQ_VAL | Input | Torque value in % where 1 = 1% of rated torque. So 100 equals 100% of rated torque. |
| TIME | Input | Torque gradient in ms. Value between 0 and 65535 ms. Set time to take in reaching the target torque value. |
| DONE | Output | Status that function block is done. |
| STAT | Output | Current status of the function block. Non-zero numbers will be an error or warning. |
The following examples can be found in OnlineHelp_ECAT_Example.
-
XPM_ECON needs to be executed first so EtherCAT servo drives are connected to receive commands.
XPM_TRQ Example Results
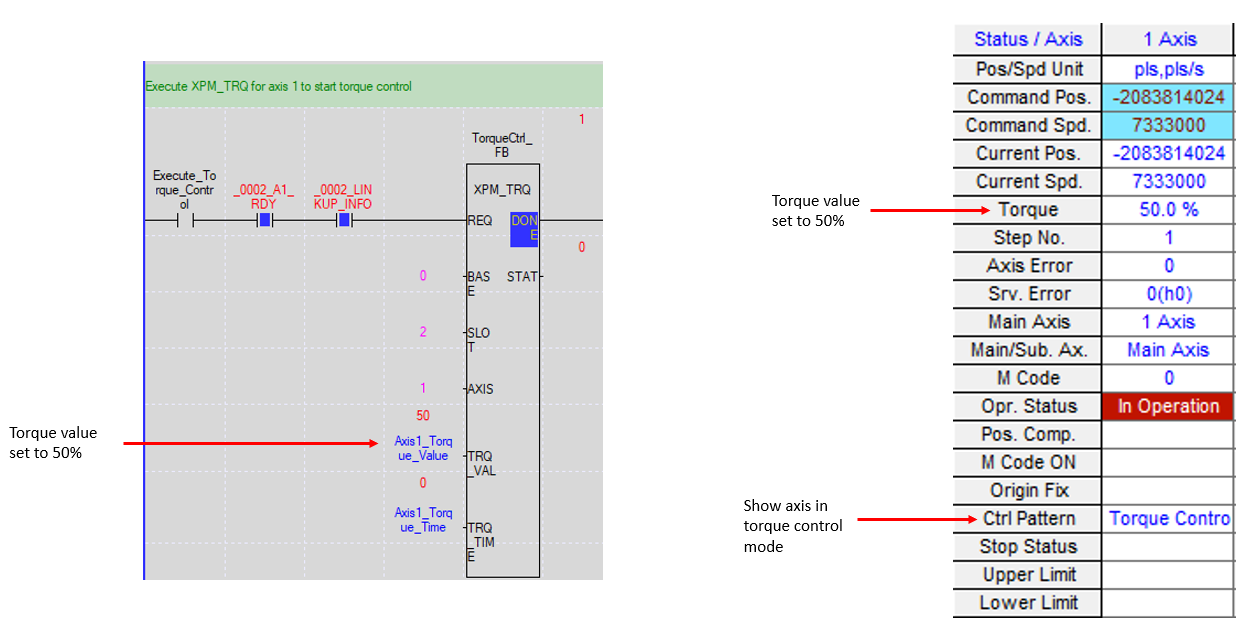
LP216