EtherCAT Servo On and Off with XPM_SVON and XPM_SVOFF
-
The XPM_SVON function block is used to enable a servo drive for operation.
-
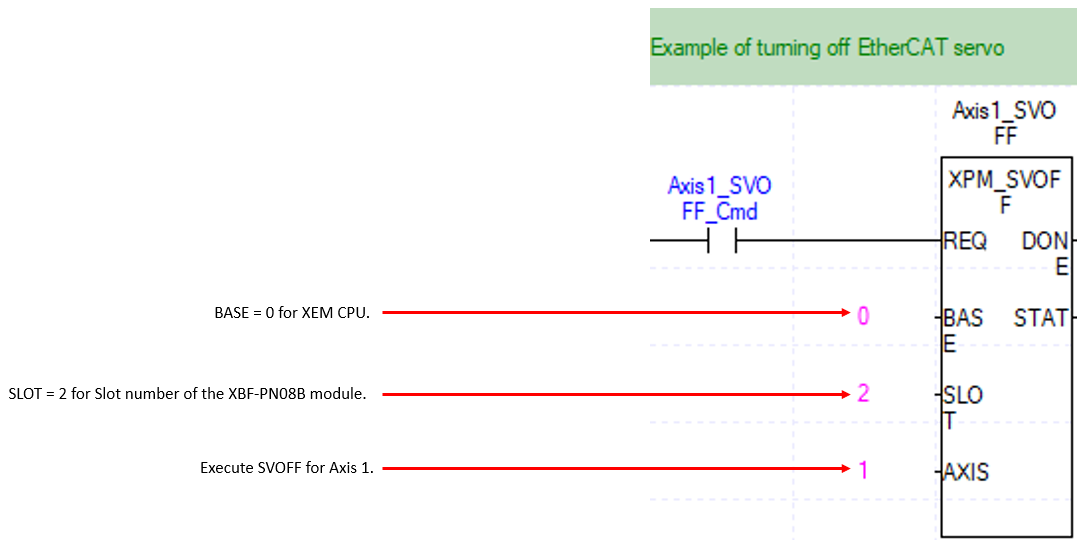
The XPM_SVOFF function block is used to disable a servo drive and prevent operation.
-
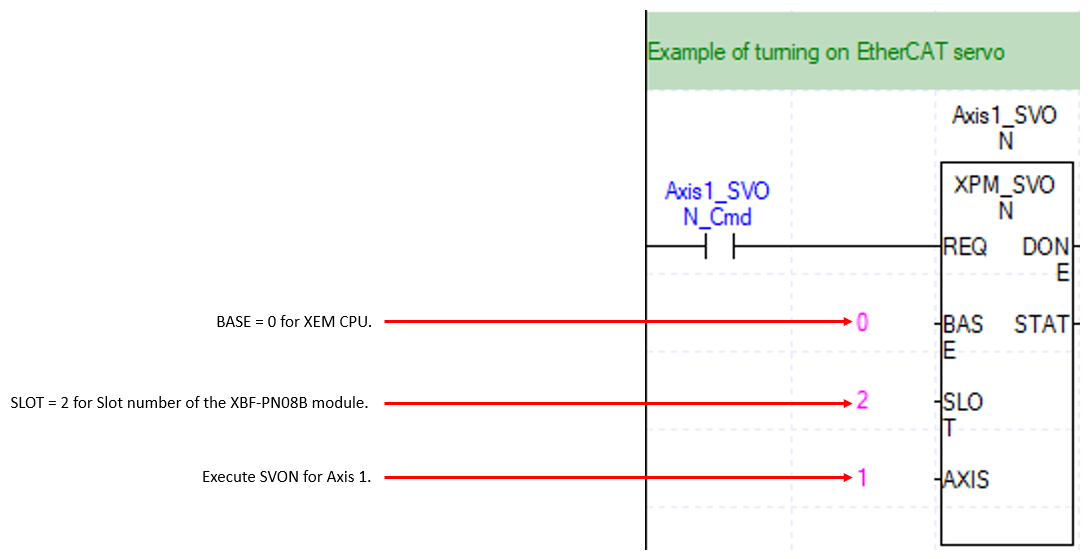
The following examples can be found in OnlineHelp_ECAT_Example.
-
XPM_ECON needs to be executed first so EtherCAT servo drives are connected to receive commands.
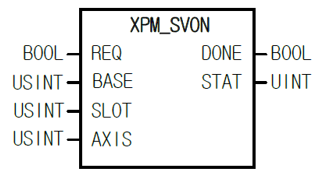
| Element Name | Element Type | Description |
|---|---|---|
| REQ | Input | Edge detected request to execute the function block |
| BASE | Input | Base number of the motion controller. Set 0 the Base number. |
| SLOT | Input | Slot number of the motion controller. Set to the slot number of the XBF-PN04B or XBF-PN08B module. |
| AXIS | Input | Axis to command with function block. |
| DONE | Output | Status that function block is done. |
| STAT | Output | Current status of the function block. Non-zero numbers will be an error or warning. |
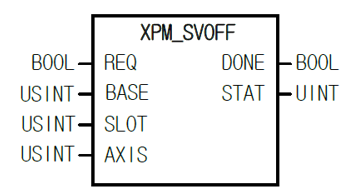
| Element Name | Element Type | Description |
|---|---|---|
| REQ | Input | Edge detected request to execute the function block |
| BASE | Input | Base number of the motion controller. Set 0 the Base number. |
| SLOT | Input | Slot number of the motion controller. Set to the slot number of the XBF-PN04B or XBF-PN08B module. |
| AXIS | Input | Axis to command with function block. |
| DONE | Output | Status that function block is done. |
| STAT | Output | Current status of the function block. Non-zero numbers will be an error or warning. |
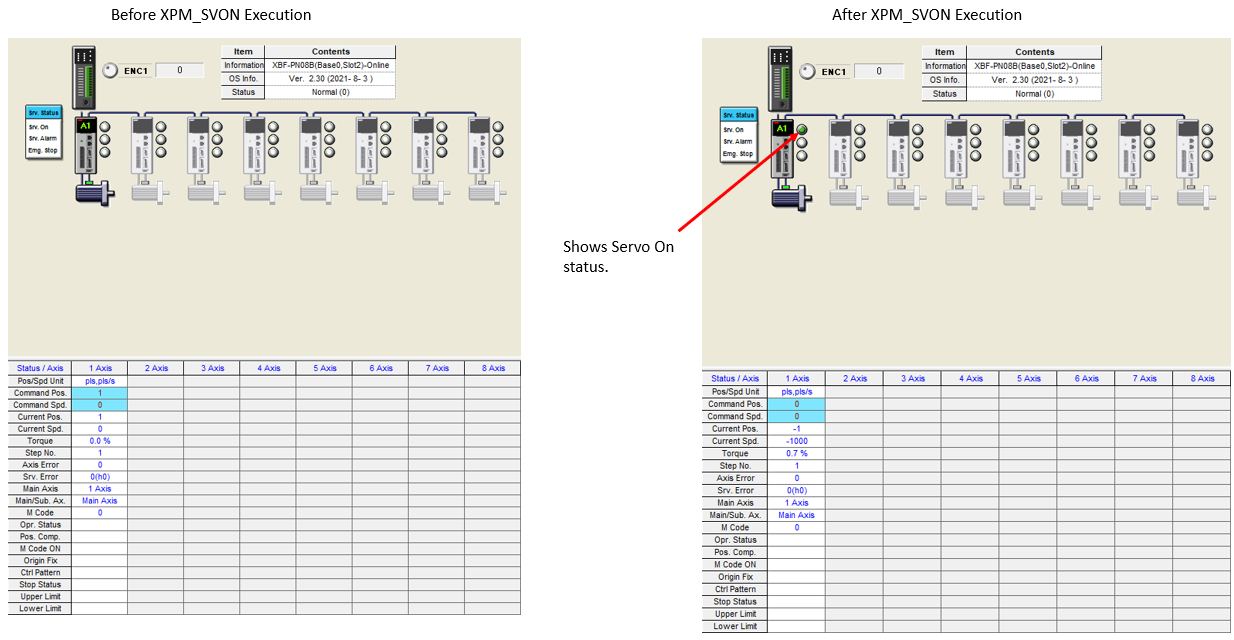
XG-PM System View after executing XPM_SVON
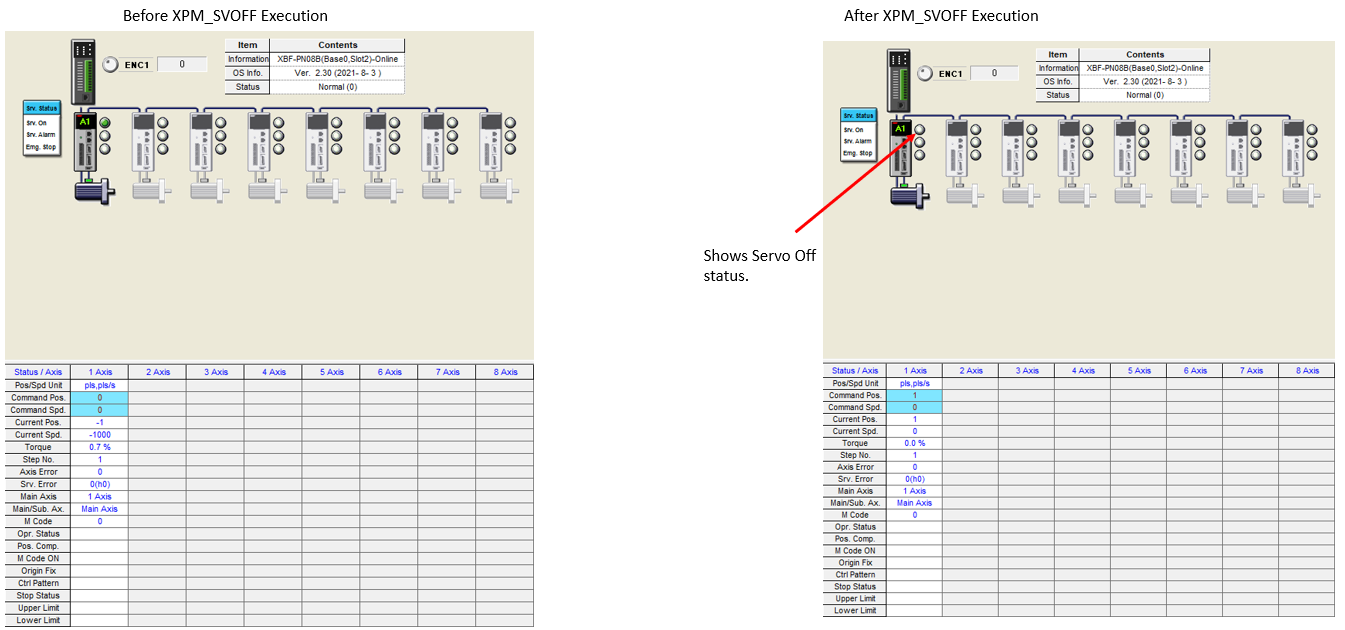
XG-PM System View after executing XPM_SVOFF
LP607