EtherCAT Servo Communication setup using XPM_ECON and XPM_DCON
The XBF-PN08B and XBF-PN04B EtherCAT motion modules require connecting to the EtherCAT servo drives.
-
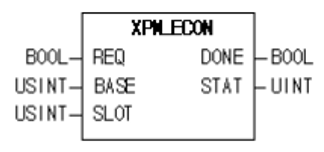
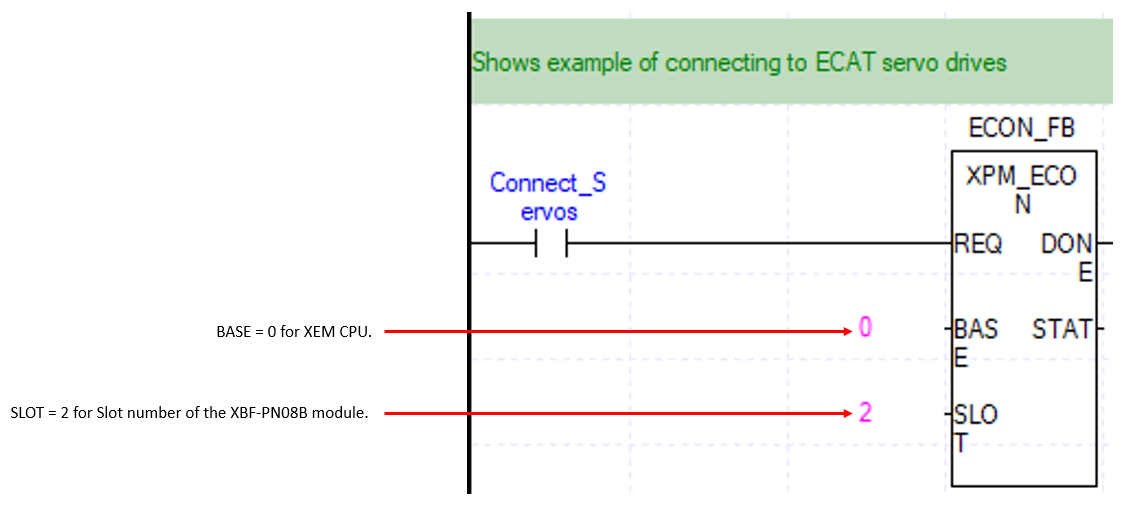
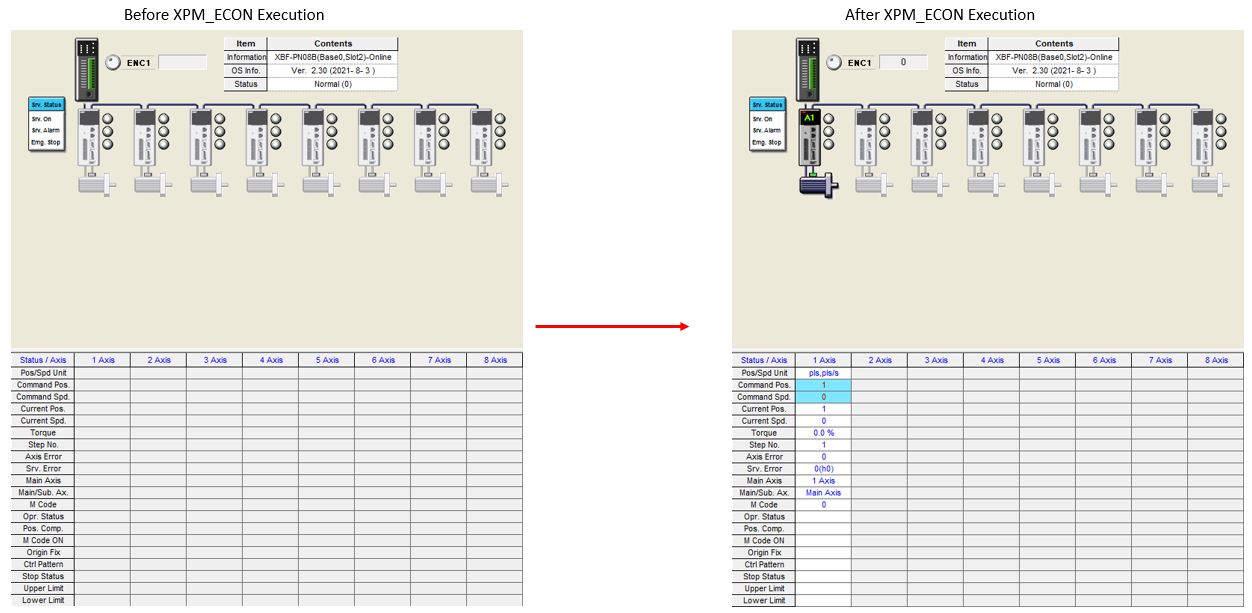
This is done using the XPM_ECON function block.
-
No commands can be sent to the drives if they are not connected.
-
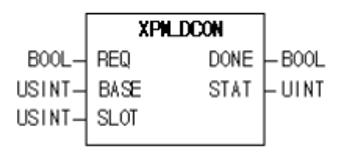
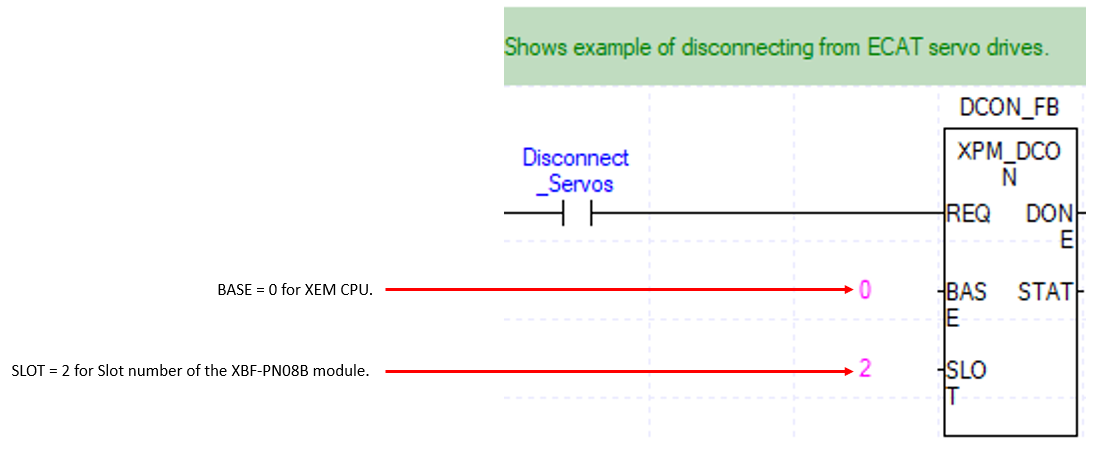
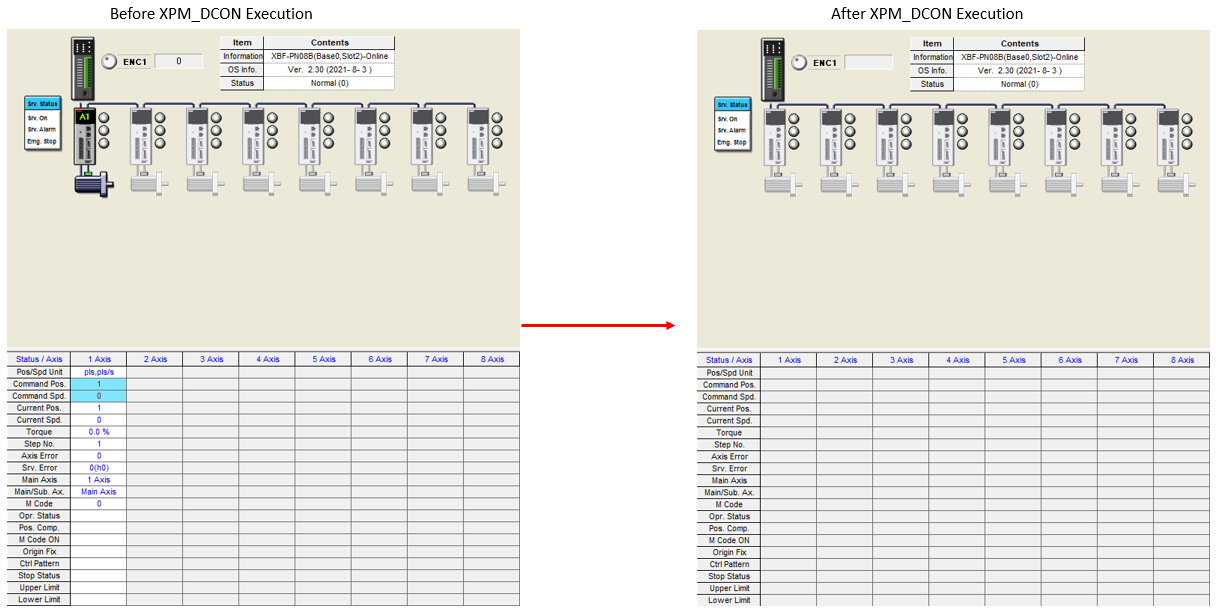
The modules can also be disconnected from the EtherCAT servo drives using the XPM_DCON function block.
-
XPM_ECON will return error number 5017 if the node number order of the EtherCAT network doesn’t match the XG-PM configuration.
-
The examples in this topic can be found in OnlineHelp_ECAT_Example.
-
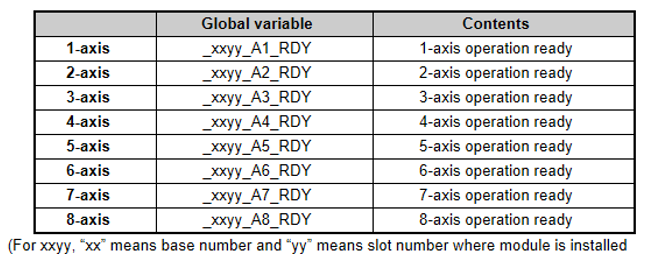
The Axes status variables will only be valid if the controller is connected to the servo drives.
-
Disconnecting the servo drives will lead to the axis status being false all the time.
| Element Name | Element Type | Description |
|---|---|---|
| REQ | Input | Edge detected request to execute the function block |
| BASE | Input | Base number of the motion controller. Set 0 to the Base number. |
| SLOT | Input | Slot number of the motion controller. Set to the slot number of the XBF-PN04B or XBF-PN08B module. |
| DONE | Output | Status that function block is done. |
| STAT | Output | Current status of the function block. Non-zero numbers will be an error or warning. |
| Element Name | Element Type | Description |
|---|---|---|
| REQ | Input | Edge detected request to execute the function block |
| BASE | Input | Base number of the motion controller. Set 0 to the Base number. |
| SLOT | Input | Slot number of the motion controller. Set to the slot number of the XBF-PN04B or XBF-PN08B module. |
| DONE | Output | Status that function block is done. |
| STAT | Output | Current status of the function block. Non-zero numbers will be an error or warning. |
XG-PM System View after executing XPM_ECON
XG-PM System View after executing XPM_DCON
LP606