Servo Parameters
Video Tutorial
XG-PM has the capability to adjust the parameters of the EtherCAT servo drive.
-
These are downloaded to the drive on power up.
-
Changed parameters won’t be downloaded until next power up cycle of the drive.
-
These values will be different depending on the servo drive and motor being used. Check the user manual of the servo drive and motor.
-
For the LS iX7NH and AMPC motors, the default values should be sufficient.
| Step | Action |
|---|---|
| 1 |
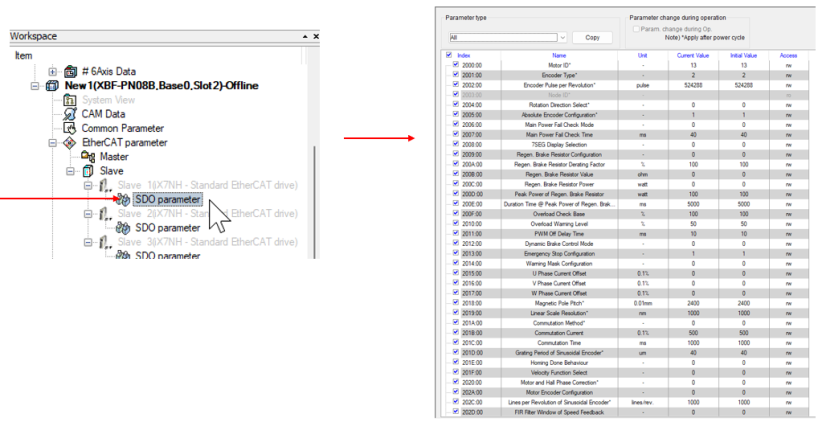
Double-click SDO parameter under the servo drive.
|
| 2 |
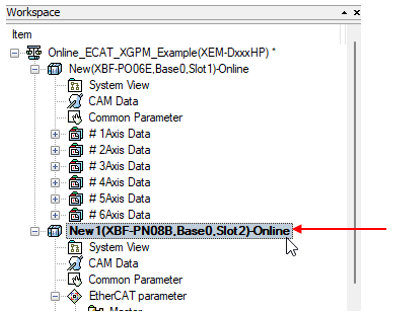
Select the XBF-PN0xB module in the project Workspace window. This example shows XBF-PN08B.
|
| 3 |
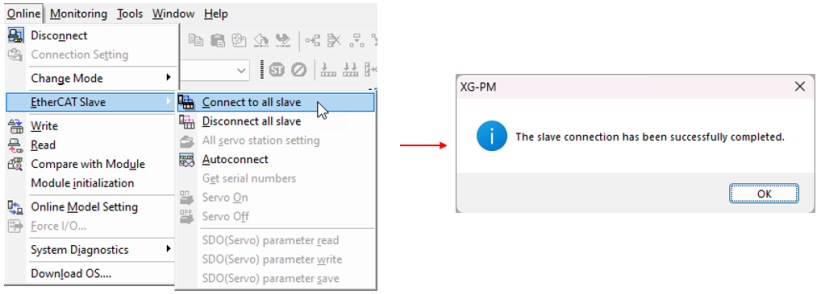
Go to Online è EtherCAT Slave è Connect to all slave. This will connect the EtherCAT network if it has not previously been connected
|
| 4 |
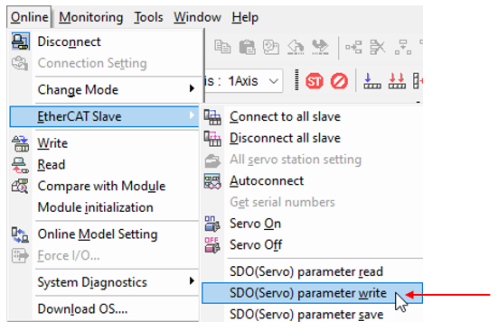
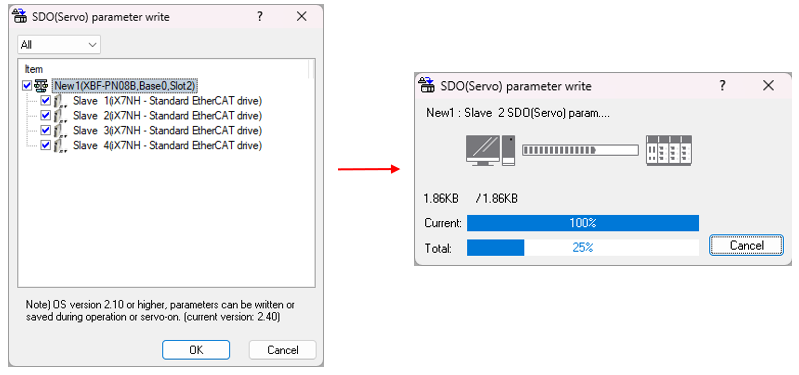
Go to Online è EtherCAT Slave è SDO(Servo) parameter write
|
| 5 |
Select the slaves to write the SDO parameters to.
Press OK.
|
LP602-5