Stopping Motion with XPM_STP and XPM_EMG
Both XPM_STP and XPM_EMG can be used for stopping motion.
-
XPM_STP is a deceleration stop.
-
XPM_EMG is an emergency stop.
Video Tutorial
-
The deceleration time means the time required from the speed limit of the axis’s basic parameters to stop.
-
Deceleration time of 0 will use the deceleration time of the current running motion command.
-
If XPM_STP executes in speed/position synchronization or CAM operation, speed/position synchronization or CAM operation stops depending on the state of the current operation control.
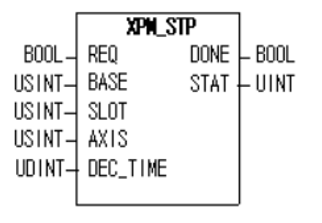
| Element Name | Element Type | Description |
|---|---|---|
| REQ | Input | Edge detected request to execute the function block |
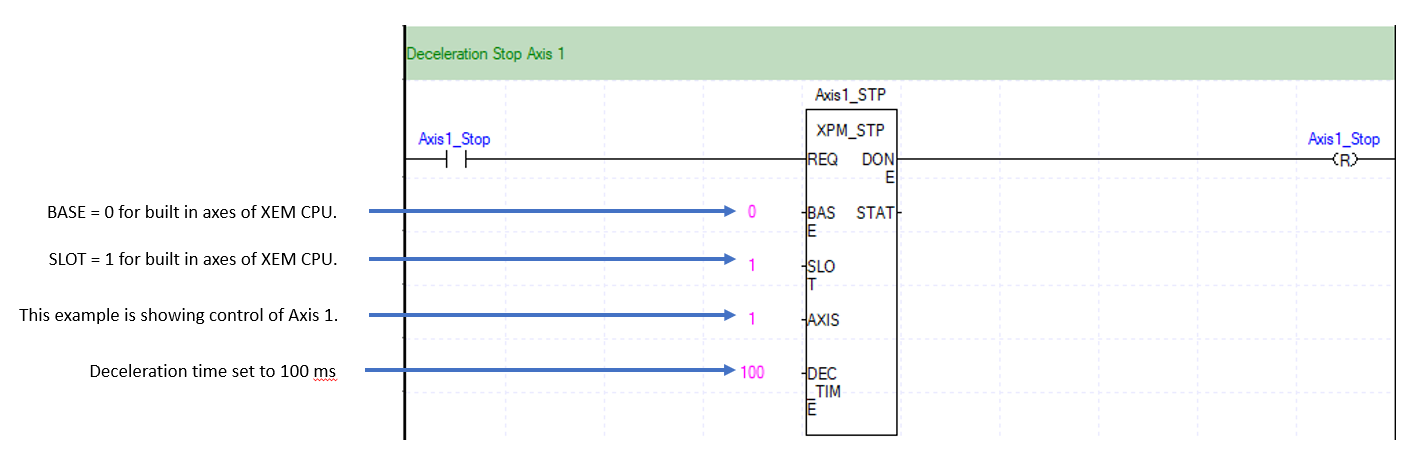
| BASE | Input | Base number of the motion controller. Equal to 0 for built-in position control. |
| SLOT | Input | Slot number of the motion controller. Equal to 1 for built-in position control |
| AXIS | Input | Axis number to control. Set to 1 thru 6 for built-in axes. This can be a constant or variable. |
| DEC_TIME | Input | Deceleration time in milliseconds. Values: 1 ~ 2147483647 ms. |
| DONE | Output | Status that function block is done. |
| STAT | Output | Current status of the function block. Non-zero numbers will be an error or warning. |
XPM_STP Example:
-
XPM_EMG is used to stop operation of an axis immediately.
-
XPM_EMG will put the axis in stopped state.
-
The deceleration time is set in the basic parameters of each axis.
-
Using XPM_EMG will cause the axis to generate error code ‘481’.
-
XPM_RST needs to be executed after executing XPM_EMG to clear the error code.
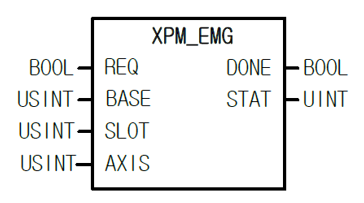
| Element Name | Element Type | Description |
|---|---|---|
| REQ | Input | Edge detected request to execute the function block |
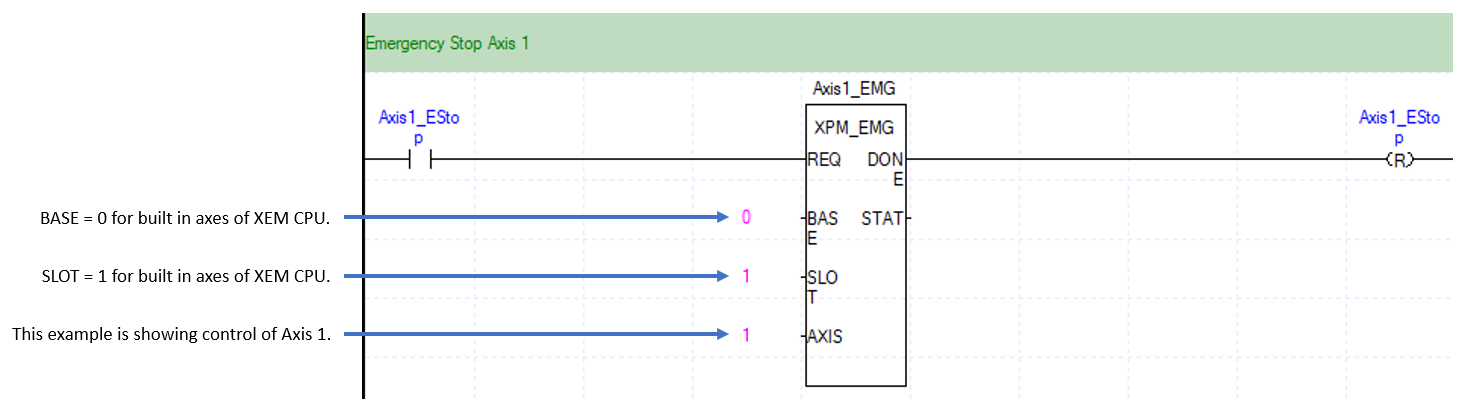
| BASE | Input | Base number of the motion controller. Equal to 0 for built-in position control. |
| SLOT | Input | Slot number of the motion controller. Equal to 1 for built-in position control |
| AXIS | Input | Axis number to control. Set to 1 thru 6 for built-in axes. This can be a constant or variable. |
| DONE | Output | Status that function block is done. |
| STAT | Output | Current status of the function block. Non-zero numbers will be an error or warning. |
XPM_EMG Example:
LP520