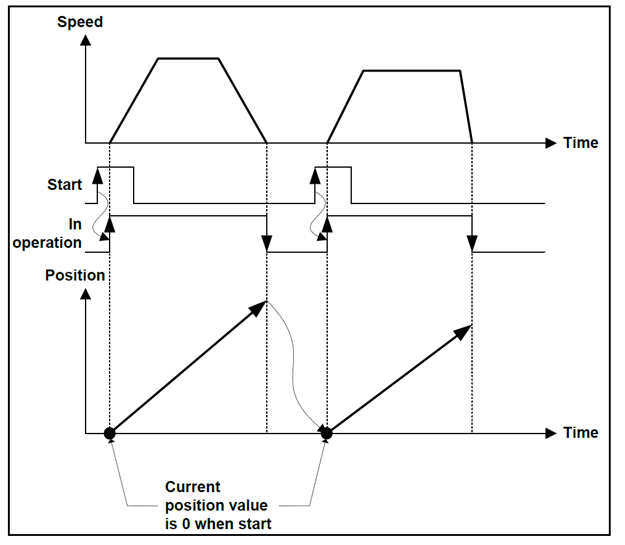
XPM_IST with FEED Control
FEED Control will reset the current position to 0 when executed.
-
It will then move the number of Pulses in the Target position value of the Position table step.
-
If it is run again, then the current Position will be set to 0 again before moving.
-
Positive Target Position value will move in positive direction.
-
Negative Target Position value will move in negative direction.
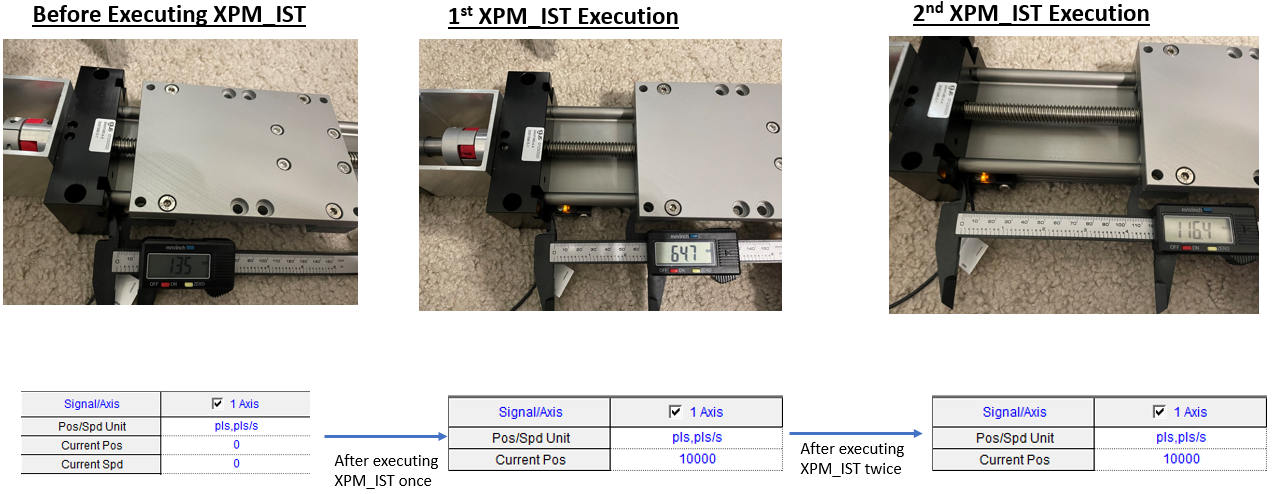
Target Position is set to 10000 to move in positive direction 10,000 pulses.

In this example, we will execute XPM_IST two times in FEED Control.
LP517-7