XPM_DST Details
| Element Name | Element Type | Description |
|---|---|---|
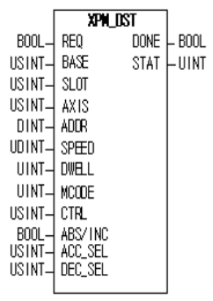
| REQ | Input | Edge detected request to execute the function block |
| BASE | Input | Base number of the motion controller.Equal to 0 for built-in position control. |
| SLOT | Input | Slot number of the motion controller.Equal to 1 for built-in position control |
| AXIS | Input | Axis number to control.Set to 1 thru 6 for built-in axes. This can be a constant or variable. |
| ADDR | Input | Destination position for the move when a request is sent. The sign of the value determines the rotation direction.Positive value is positive direction. Negative value is negative direction. This can be a constant or variable. |
| SPEED | Input | Speed the move will be executed at. This can be a constant or variable. |
| DWELL | Input | Dwell time setting 0 – 65535 ms. This can be a constant or variable. |
| MCODE | Input | M code value setting. Value not important to XEM CPU built-in motion. This can be a constant or variable. |
| CTRL | Input | Control Method. 0 = Position control, 1 = Speed Control, 2 = Feed Control. This can be a constant or variable. |
| ABS/INC | Input | 0 = Absolute Positioning, 1 = Relative Positioning. This can be a constant or variable. |
| ACC_SEL | Input | Acceleration time setting from XG-PM program. 0 = Acc. Time 1, 1 = Acc. Time 2, 2 = Acc. Time 3, 3 = Acc. Time 4.This can be a constant or variable. |
| DEC_SEL | Input | Deceleration time setting from XG-PM program. 0 = Dec. Time 1, 1 = Dec. Time 2, 2 = Dec. Time 3, 3 = Dec. Time 4.This can be a constant or variable. |
| DONE | Output | Status that function block is done. |
| STAT | Output | Current status of the function block.Non-zero numbers will be an error or warning. |
LP516-1