Overview of the APM/XPM Function Blocks
This topic explains the APM and XPM function blocks that can be use for the motion control programming.
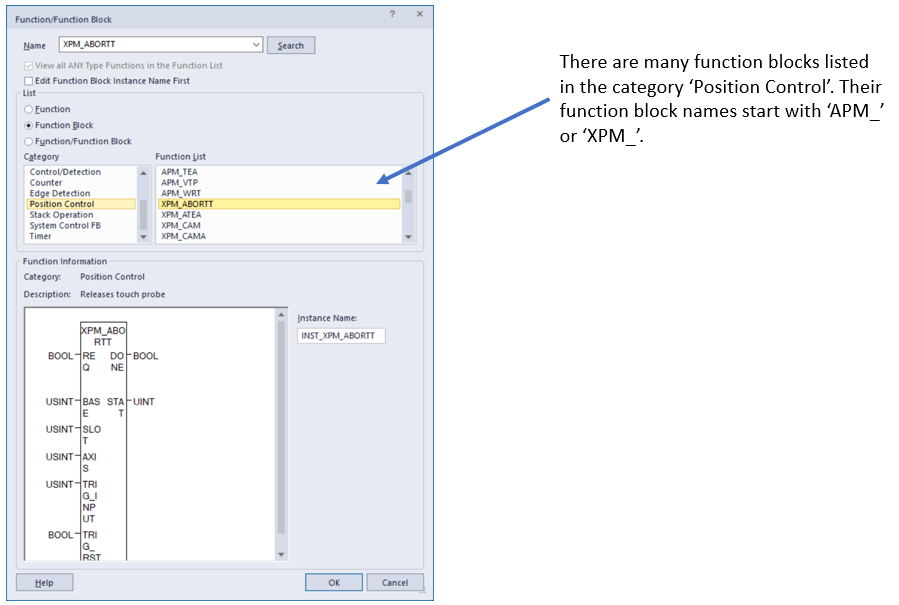
Position Control function blocks
While you are writing a Ladder Diagram (LD) or Structured Text (ST) program, you can open the Function/Function Block window by pressing the F10 key or selecting Function/FB from the Edit pull-down menu.
APM function blocks
These are older function blocks. Only the APM_PWM function block can be used with the motion controller (XBF-PO02E or XBF-PO06E) built in the XEM CPU modules.
XPM function blocks
These are newer function blocks. Many of them can be used with the motion controller (XBF-PO02E or XBF-PO06E) built in the XEM CPU modules.
Available Function Blocks
The following APM and XPM function blocks work with the motion controller (XBF-PO02E or XBF-PO06E) built in the XEM CPU modules.
| Type | Function Block | Description in XG5000 | Function |
|---|---|---|---|
| Module information read | XPM_CRD | Read run info | Read the current status of the axis. |
| XPM_SRD | Read run state | Read the Boolean type status of the axis and copy into arrays. | |
| XPM_ENCRDB | Read encoder value (Only XEM) | Read the current value from the encoder connected to the XEM CPU module. | |
| Parameter/Operation Data Teaching | XPM_SBP | Basic parameter setting | Set the Basic Parameters of the axis. |
| XPM_SEP | Extension parameter setting | Set the Extended Parameters of the axis. | |
| XPM_SMP | Manual operation parameter setting | Set the Manual Operation Parameters of the axis. | |
| XPM_SIP | External signal parameter settings | Set the I/O Signal Parameters of the axis. | |
| XPM_SCP | Common parameter setting | Set the Common Parameters of the motion controller XBF-PO02E/6E. | |
| XPM_SMD | Operation data settings | Set the parameters of a step in the Position Data table of the axis. | |
| XPM_ATEA | Plural teaching | Set up to 16 position/speed parameters in the Position Data table of the axis. | |
| XPM_VRD | Variable data read | Read up to 128 variable data of the axis. | |
| XPM_VWR | Variable data write | Set up to 128 variable data of the axis. | |
| XPM_WRT | Save parameter/run data | Save the configuration parameters and position data of the selected axes into ROM. | |
| XPM_SHP | Origin return parameter setting | Set the Homing Parameters of the axis. | |
| Start/Stop | XPM_ORG | Origin return run | Start homing according to the Homing Parameter setup. |
| XPM_DST | Direct run | Output pulses directly without using the Position Data table. | |
| XPM_IST | Indirect run | Output pulses by using the Position Data table. | |
| XPM_ELIN | Ellipse interpolation | Execute an ellipse interpolation with 2 axes by using the Position Data table. | |
| XPM_SST | Simultaneous run | Start running the selected axes simultaneously by using the Position Data table. | |
| XPM_PST | Point run | Execute up to 20 steps in the Position Data table of the axis continuously. These steps are not necessary in series. | |
| XPM_STP | Decelerating stop | Stop the axis with deceleration. | |
| XPM_EMG | Emergency stop | Stop the axis in the deceleration time specified in the Basic Parameter. The default deceleration time is 0. | |
| XPM_RSTR | Restart | Restart the operation after the axis was stopped by the XPM_STP function block. | |
| Manual Operation | XPM_JOG | Jog run | Execute the JOG operation according to the Manual Operation Parameter setup. |
| XPM_INC | Inching run | Execute the inching operation according to the Manual Operation Parameter setup. | |
| XPM_RTP | Return to the position before manual run | Return to the position before the manual operation (JOG or inching) started. | |
| Synchronization Start | XPM_SSP | Position synchronization | Execute a step in the Position Data table of the slave axis after the master axis reached the defined position. |
| XPM_SSS | Speed synchronization | Control the speed of the slave axis according to the ratio setup with the master axis. | |
| XPM_SSSP | Positioning speed sync | Control the speed of the slave axis according to the ratio setup with the master axis until the slave axis reaches the defined position. | |
| XPM_CAM | CAM run | Execute a predefined CAM block with the slave axis according to the movement of the master axis. | |
| XPM_CAMO | CAM run with master offset | Execute a predefined CAM block with the slave axis after the master axis moved the distance defined as the offset. | |
| Modification | XPM_POR | Position override | Change the target position while the axis is operating. |
| XPM_SOR | Speed override | Change the speed while the axis is operating. | |
| XPM_PSO | Positioning speed override | Change the speed after the axis reached the defined position. | |
| XPM_PTV | Position/Speed control conversion | Switch from the position control mode to the speed control mode. | |
| XPM_VTP | Speed/Position control conversion | Switch from the speed control mode to the position control mode. | |
| XPM_VTPP | Speed/Position control conversion with position | Switch from the speed control mode to the position control mode and move the defined distance. | |
| XPM_SKP | Skip run | Stop executing the current step in the Position Data table and move to the next step. | |
| XPM_NMV | Continuous run | Move to the next step in the Position Data table without stopping. | |
| XPM_SNS | Run step number change | Change the current step number of the Position Data table. | |
| XPM_SRS | Repeat step number change | Change the repeat step number of the Position Data table. | |
| XPM_PRS | Current position preset | Change the current position value. | |
| XPM_EPREB | Encoder value preset | Change the current value of the encoder. | |
| Error | XPM_RST | Error reset | Reset the error. |
| XPM_HRST | Error-history reset | Reset the error history. | |
| Other | XPM_FLT | Floating origin setting | Set the current position as the origin. |
| XPM_MOF | M code off | Reset the M code. | |
| APM_PWM | N/A | Pulse with modulation (PWM) output from an axis. |
LP510