SureServo2 Registers
The Status monitor registers are parameters P0.009 – P0.013. These registers consolidate the data so that one Modbus read message can poll all desired servo monitor data.
-
This corresponds to Modbus addresses 400019 (0012h) – 400028 (001Bh).
-
Each parameter is a 32-bit register that consumes 2 Modbus addresses (P0.009 = 400019&400020, P0.010 = 400021&400022, etc.…).
-
These are pointer registers that are configured with parameters P0.017 – P0.021.
-
The possible values that can be configured in these parameters are in the table starting in section 8.4.11 of the SureServo2 User Manual.
|
Where
to Define the Value/Code |
Modbus Address for P0.017 thru P0.021 |
|---|---|
| P0.017 | 400035 (0022h) and 400036 (0023h) |
| P0.018 | 400037 (0024h) and 400038 (0025h) |
| P0.019 | 400039 (0026h) and 400040 (0027h) |
| P0.020 | 400041 (0028h) and 400042 (0029h) |
| P0.021 | 400043 (002Ah) and 400044 (002Bh) |
| Where to Read the Monitored Data | Modbus Address for P0.009 thru P0.013 |
|---|---|
| P0.009 | 400019 (0012h) and 400020 (0013h) |
| P0.010 | 400021 (0014h) and 400022 (0015h) |
| P0.011 | 400023 (0016h) and 400024 (0017h) |
| P0.012 | 400025 (0018h) and 400026 (0019h) |
| P0.013 | 400027 (001Ah) and 400028 (001Bh) |
Explanation of Example Parameter File using Section 8.4.11 of User Manual

Mapping registers are used in a similar manner to the Status Monitor registers but allow for any Parameter to be read and/or to be written to. These registers will consolidate information that is spread out so only one Modbus read and one Modbus write message are needed.
-
Mapping registers are 32-bit and will allow 32-bit data parameters for each entry or 2 16-bit parameters.
-
The Mapping registers are at parameters P0.025 – P0.032.
-
They are 32-bit registers and are accessed at Modbus addresses 400051 (0032h) – 400066 (0041h).
-
They consume 2 Modbus addresses per parameter (P0.025 = 400051&400052, P0.026 = 400053&400054).
-
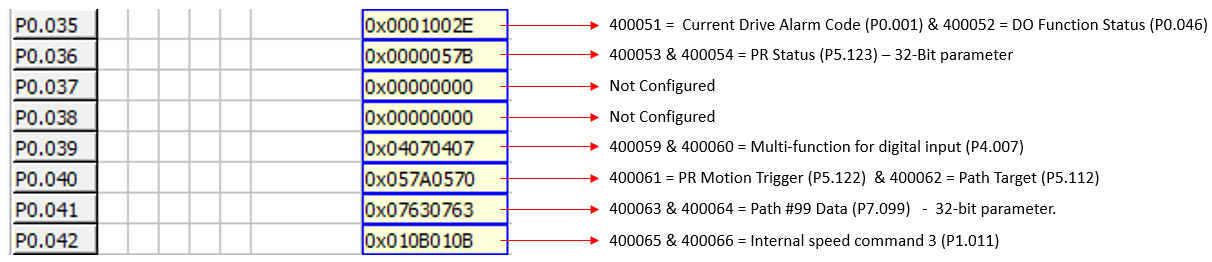
These are pointer registers that are configured with parameters P0.035 – P0.042.
| Where to Specify the Data Parameter Numbers to Map from/to | Modbus Address for P0.035 thru P0.042 |
|---|---|
| P0.035 | 400071 (0046h) and 400072 (0047h) |
| P0.036 | 400073 (0048h) and 400074 (0049h) |
| P0.037 | 400075 (004Ah) and 400076 (004Bh) |
| P0.038 | 400077 (004Ch) and 400078 (004Dh) |
| P0.039 | 400079 (004Eh) and 400080 (004Fh) |
| P0.040 | 400081 (0050h) and 400082 (0051h) |
| P0.041 | 400083 (0052h) and 400084 (0053h) |
| P0.042 | 400085 (0054h) and 400086 (0055h) |
| Where to Load/Retrieve | Modbus Address for P0.025 thru P0.032 |
|---|---|
| P0.025 | 400051 (0032h) and 400052 (0033h) |
| P0.026 | 400053 (0034h) and 400054 (0035h) |
| P0.027 | 400055 (0036h) and 400056 (0037h) |
| P0.028 | 400057 (0038h) and 400058 (0039h) |
| P0.029 | 400059 (003Ah) and 400060 (003Bh) |
| P0.030 | 400061 (003Ch) and 400062 (003Dh) |
| P0.031 | 400063 (003Eh) and 400064 (003Fh) |
| P0.032 | 400065 (0040h) and 400066 (0041h) |
Explanation of Example Parameter File’s Mapping Registers

Quick explanation of PR paths in SureServo2:
SureServo2 has 99 PR “paths” that define individual moves. These paths consist of two 32-bit registers each. All the relevant data for any move (or jump, write, statement, etc.) is contained in these two registers. For a point-to-point move, that includes Accel, Decel, Speed, Target Position, etc. The data is consolidated and can be difficult to parse out of a 32-bit register. Fortunately, SureServo2 Pro has a PR Mode Setting window that configures these easily. Use SureServo2 Pro’s PR Mode Setting window to configure and test moves before establishing PLC comms.
For moves that will change during runtime, there are also registers P5.112 – P5.123 that allow comms to easily Load, Save, and Trigger PR paths without having to parse the configuration into 32-bit registers. When P5.122 PR Motion Trigger is changed from 0è1, the PR path loaded into P5.112 Path Target will be executed. P5.122 will automatically be reset to 0. See the SureServo2 User Manual for more information on registers P5.112 – P5.123.
LP213-3